SOUTENEZ-NOUS! Déjà 28 personnes nous ont soutenu. Nous vous en sommes très reconnaissants.
RETROUVEZ NOUS SUR:
Un routeur (Pour gravure et découpe) laser DIY.
Réalisation d'un appareil permettant la découpe et la gravure au laser de matériaux comme le bois, le papier, le plastique, le carton, les mirroirs (Le tout fait maison et le moins cher possible). Une imprimante 3D est nécessaire..
La culture maker (de l'anglais make, lit. faiseur) est une culture (ou sous-culture) contemporaine constituant une branche de la culture Do it yourself (DIY) (qu'on peut traduire en français par « faites-le vous-même »). (Source: Wikipedia)
les "Crazy Makers" sont les plus fous et les plus passionnés des makers...
15 à 20 jours en tenant compte des temps d'impression et de montage.
Resultat recherché:
J'avais par le passé réalisé un routeur Laser/CNC assez peu précis et peu puissant...
Maintenant que je possède une imprimante 3D et que je me débrouille pas mal en modélisation, j'ai décidé de réaliser une version évoluée de mon routeur, le moins cher possible et en réutilisant un maximum d'éléments de l'ancienne machine...
Pour vous mettre l'eau à la bouche, voici la bête en fonctionnement...
Matériel:
Pièces à acheter
90% des pièces ont été achetées en asie sur eBay, c'est pourquoi le projet a été aussi long mais ne roulant vraiment pas sur l'or, pas d'autre choix!
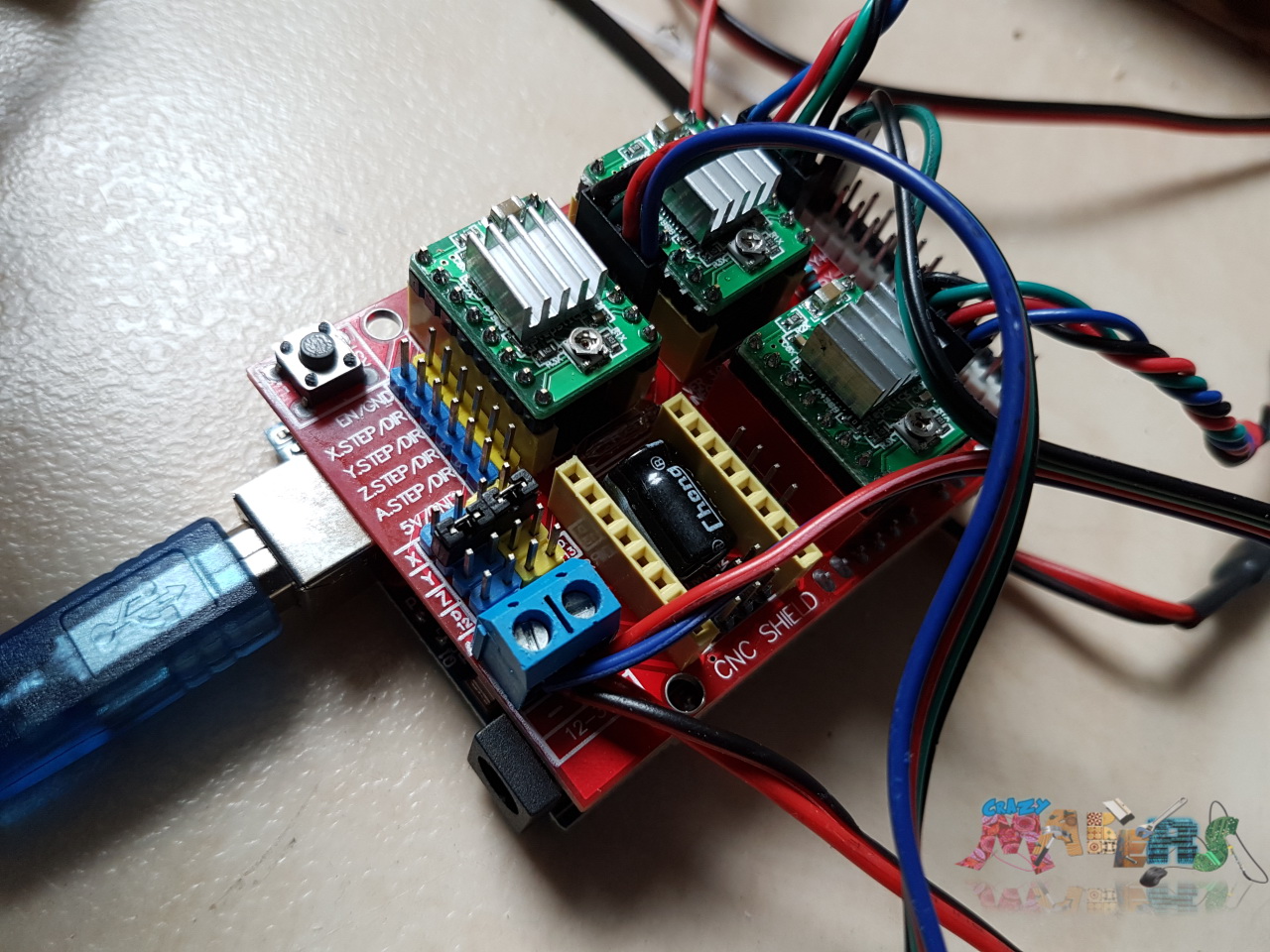
1 Carte Arduino Uno + CNC shield + 3 drivers Pololu A4988 (15€ le kit)
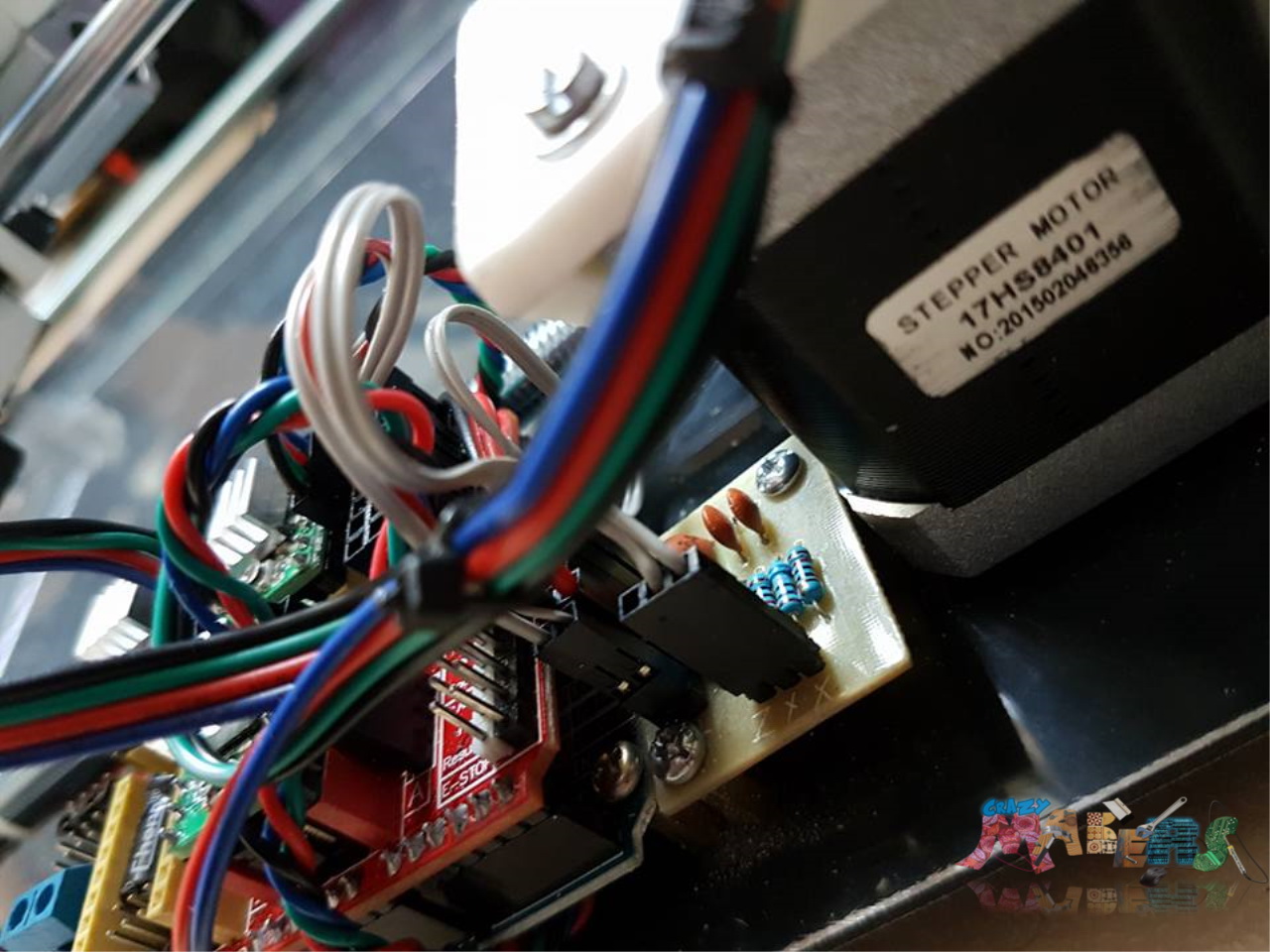
3 Moteurs pas à pas 17hs8401 avec poulies GT20 à 20 dents (50€ le lot)
6 roulements épaulés. (3€)
6 Paliers à billes 6mm (2.80€ pièce)
4 Tiges Inox (glissières) 6mm (12€ les 4)
4 Tiges filetées M10 + 16 écrous+rondelles M10 + 12 vis M3x12+24 vis CHC M4x12 (5-15€ selon le nombre)
1 Module Laser + Contrôleur. (70€ pour un set 2W)
4 Micro switch (1.99€ les 5)
Environ 3m de courroie GT20 (environ 5€)
Environ 600G d'ABS (11€ environ)
Optionnel: 1 plaque de Dibond 1000x1000 pour la table de la machine. (Pas donné, le mieux c'est la récup')
De la nappe, du câble et des connecteurs à sertir 0.1"
Des boutons et une plaque de plastique de récupération pour le pupitre.
Concernant les réglages, la plupart des pièces ont été imprimées en 0.2mm/couche...
Pour les très petites pièces (support switch, fixations de passe câbles) 0.1mm/couche.
Conception:
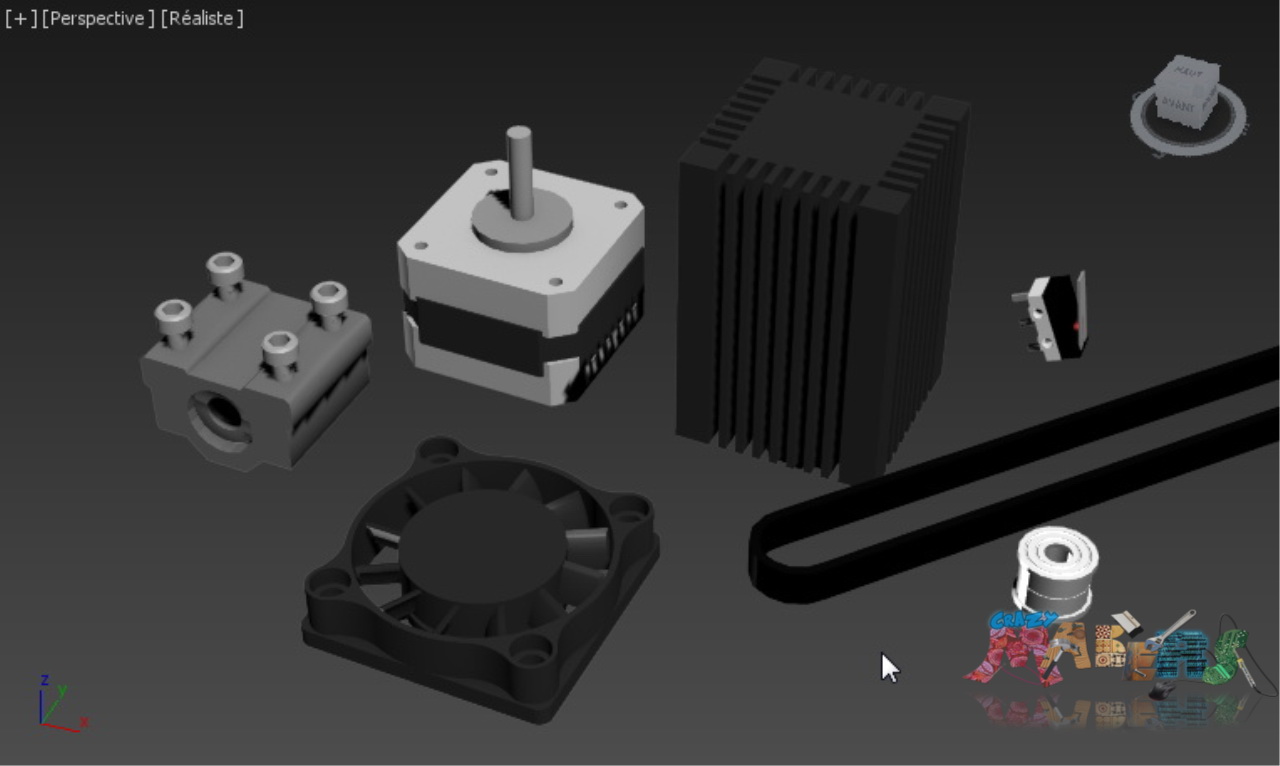
On commence par modéliser les différentes pièces détachées afin de pouvoir concevoir les autres pièces autour de celles-ci...
On peut ensuite commencer à concevoir les dirrérentes pièces de la machine en respectant les dimensions des pièces détachées.
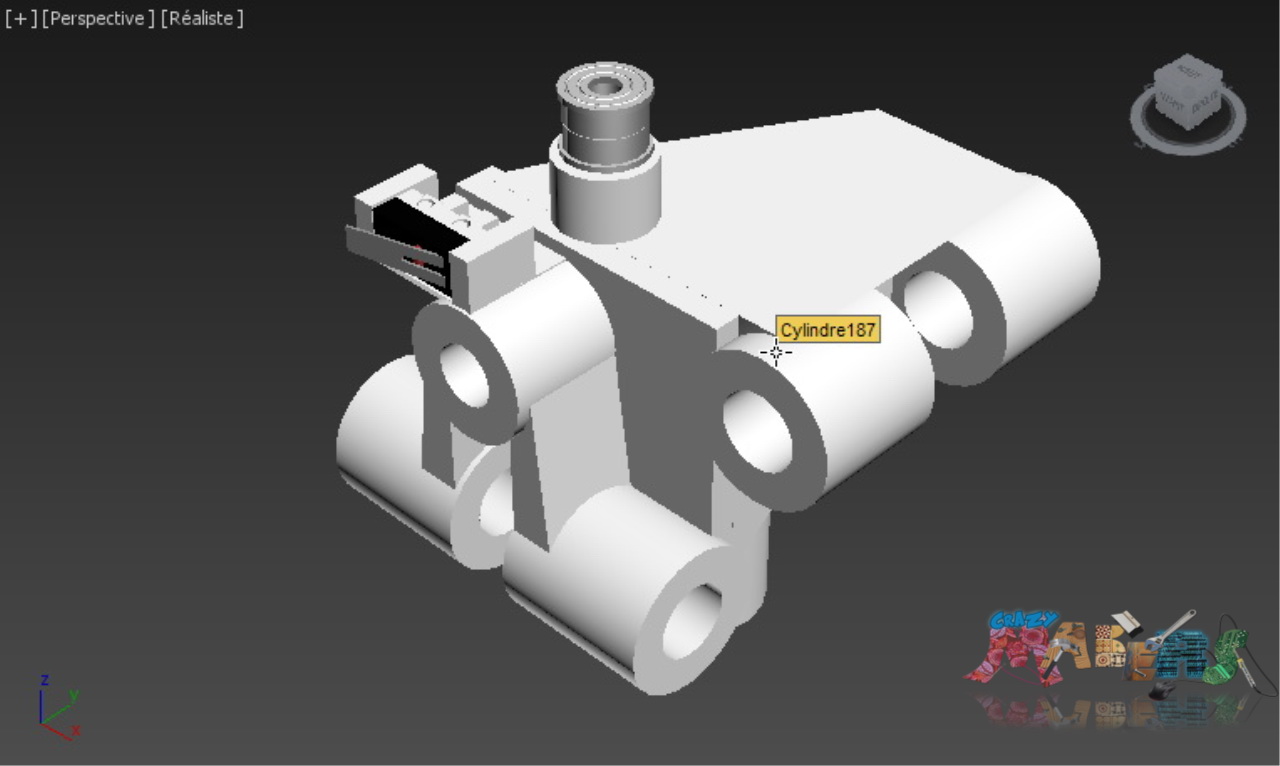
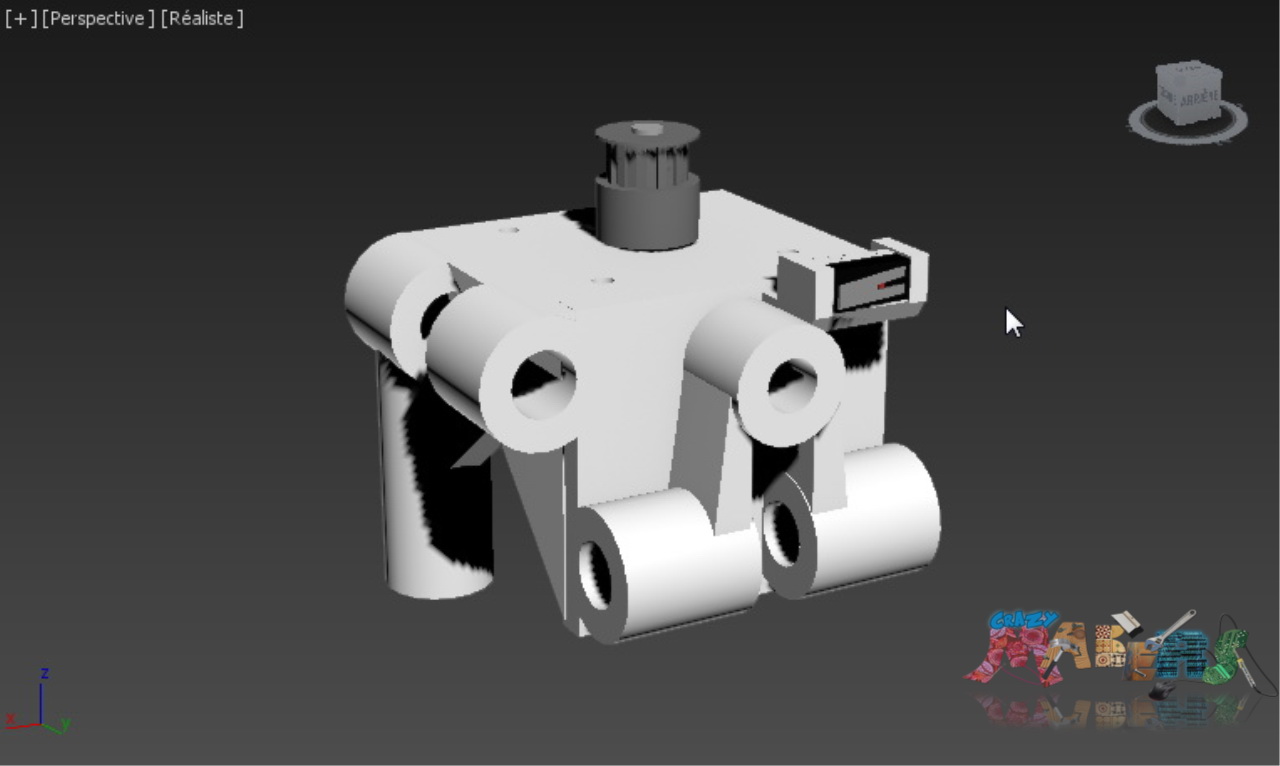
L'angle arrière droit qui va recevoir un jeu de deux roulements pour le guidage de la courroie Y(1), un capteur de fin de course Y, une tige inox diamètre 8 mm et deux tiges filetées avec écrous M10.
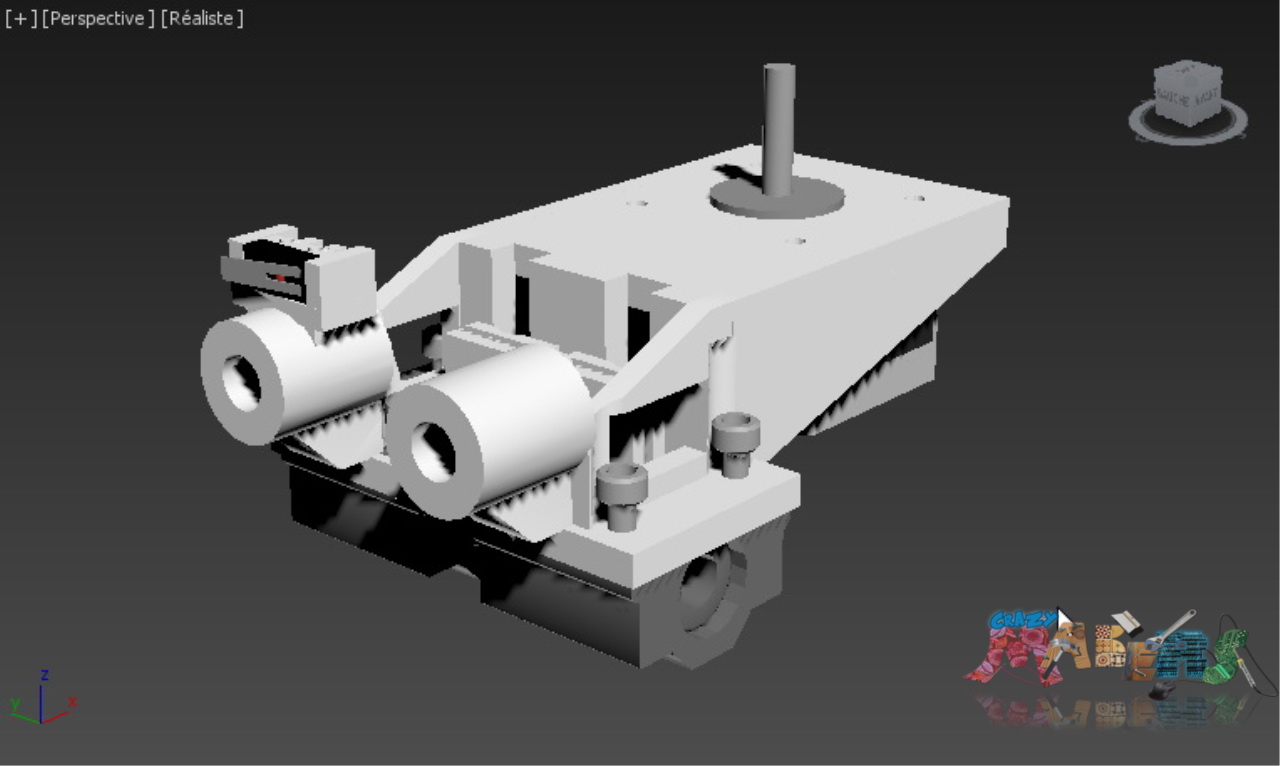
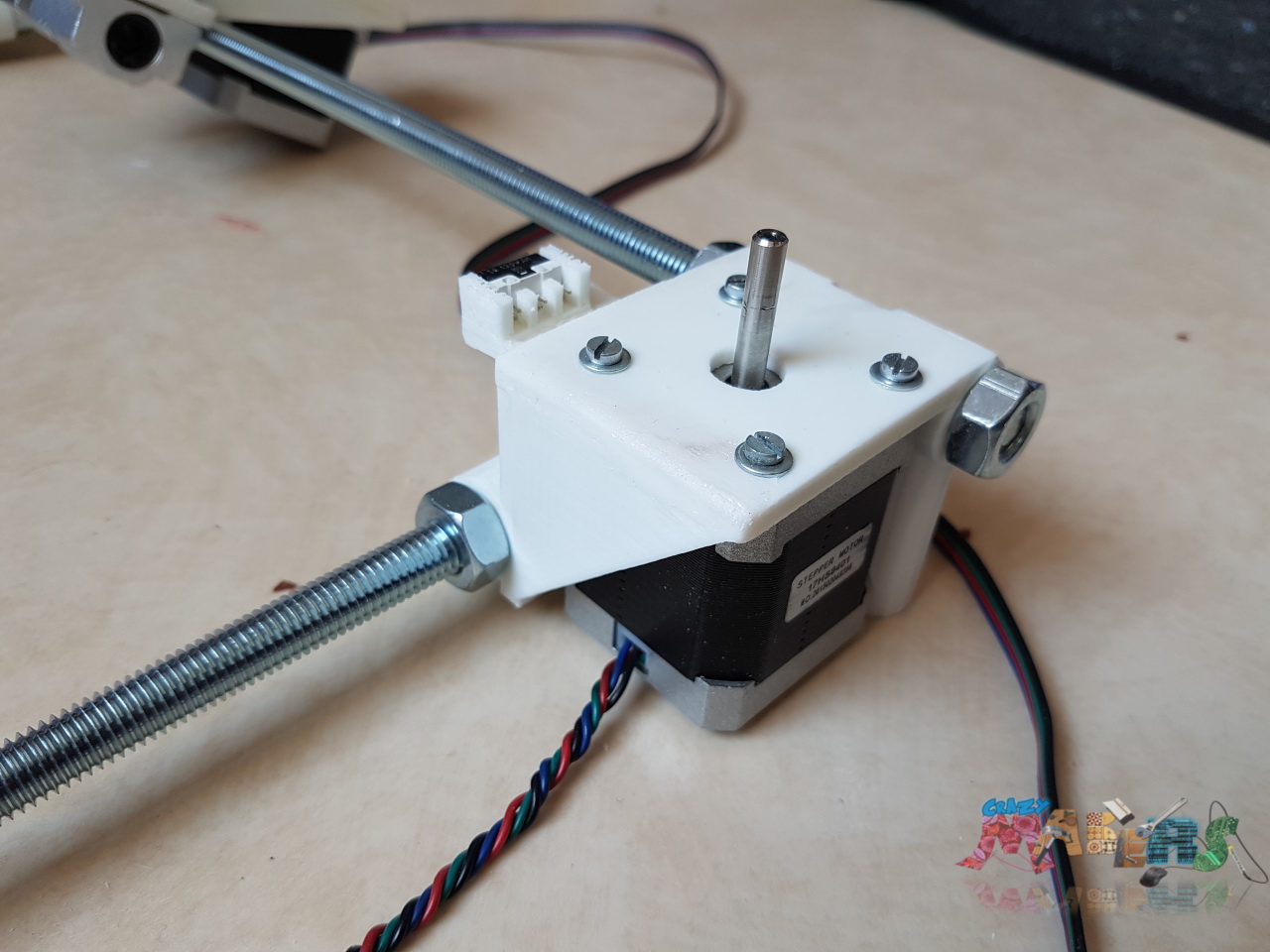
l'angle avant droit qui va recevoir le moteurs pas-à-pas Y(1) avec son pignon, un capteur de fin de course Y, une tige inox diamètre 8 mm et deux tiges filetées avec écrous M10.
Les angles opposés ne sont que des symétries de ces pièces sans les supports capteurs...
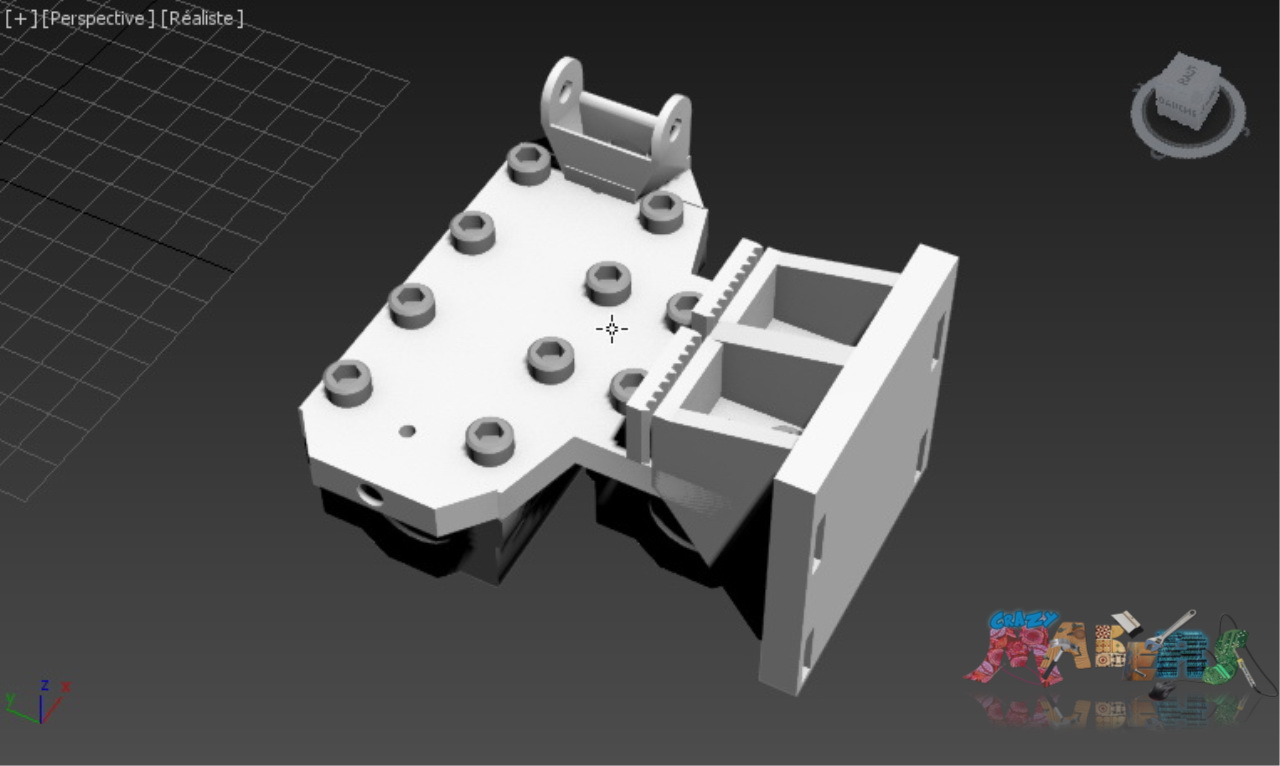
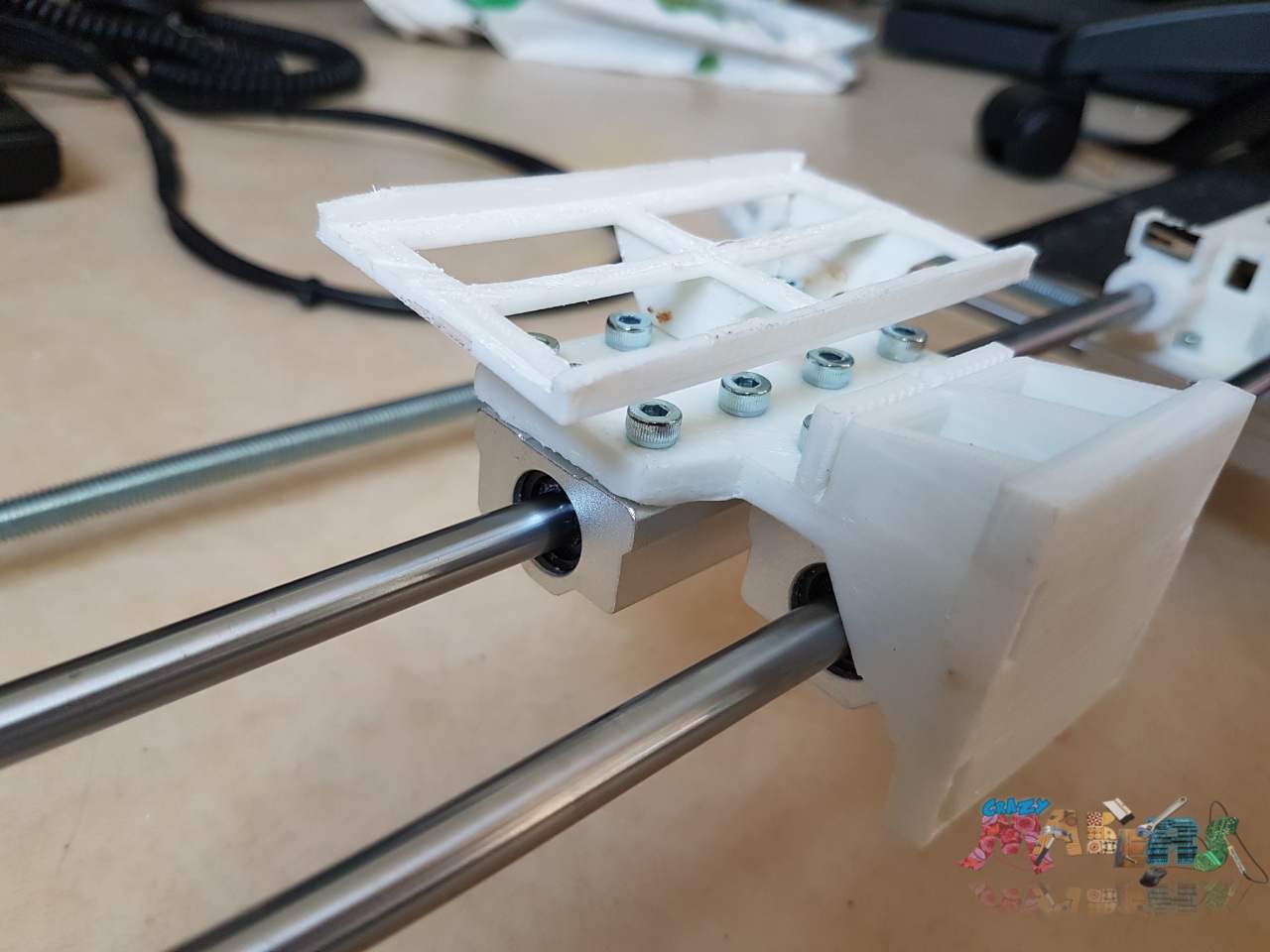
Le charriot X qui va être fixé sur deux glissières à billes diamètre 6mm grâce à 12 vis M4x25, qui devra pouvoir blouqer les extrémités de la courroie, venir en contact avec les fin de course X (1 & 2), recevoir le guide câbles, un support pour le controlleur laser et supporter le corps du laser.
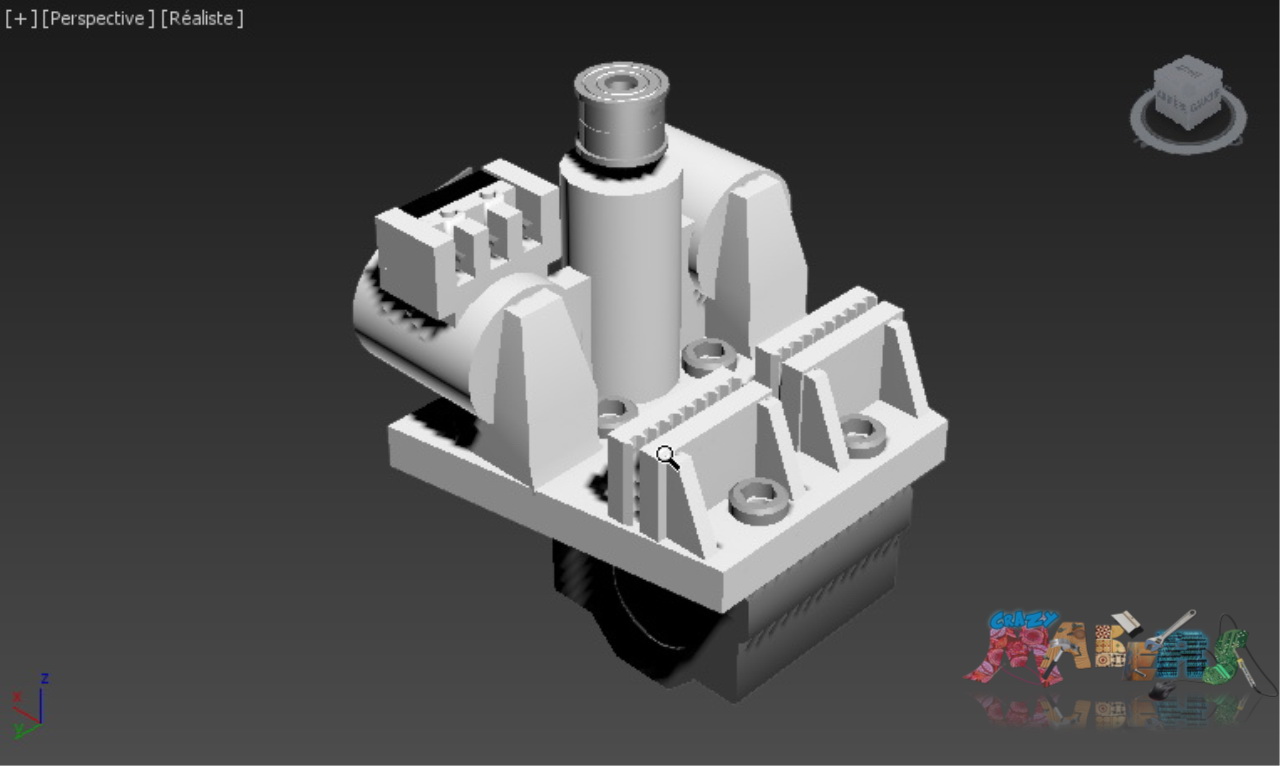
Le charriot Y droit qui doit recevoir un moteur pas-à-pas et un fin de course X(1), être fixé sur deux glissières à billes avec 8 vis et pouvoir retenir la courroie.
Le charriot Y gauche qui va recevoir un jeu de deux roulements pour le guidage de la courroie X, un capteur de fin de course X(2). il sera fixé sur une glissière à billes et devra pouvoir retenir la courroie.
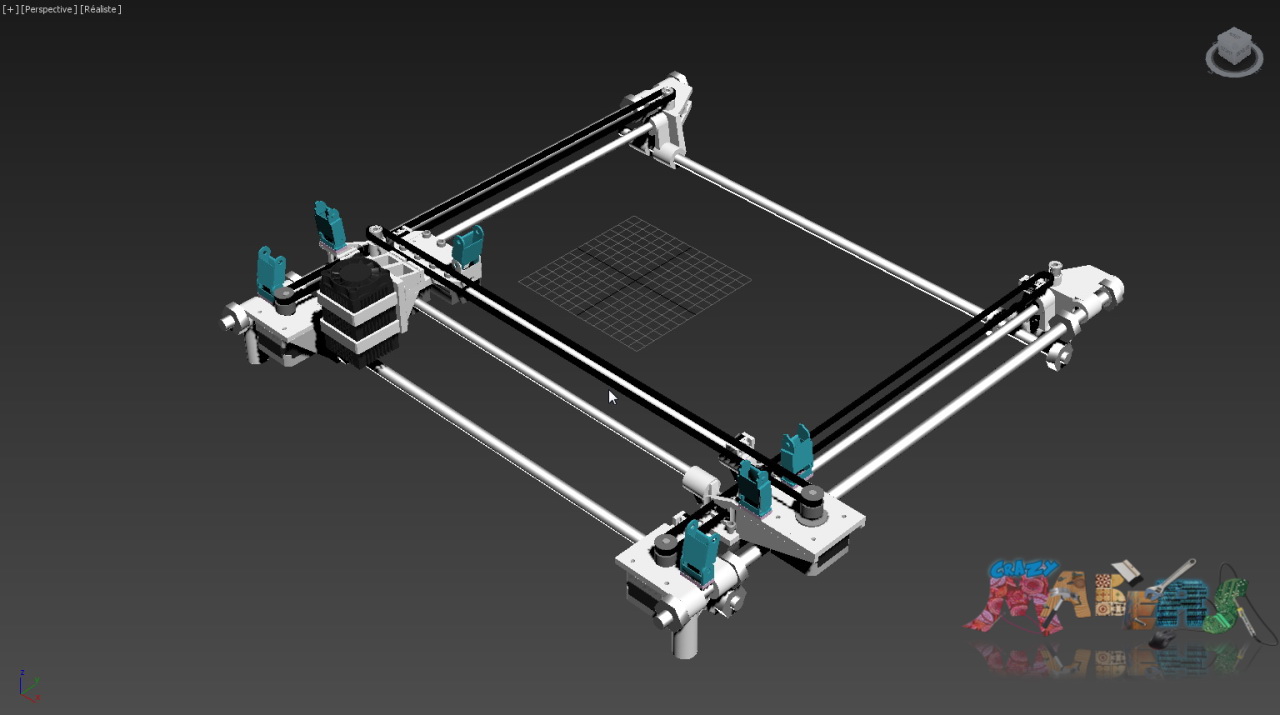
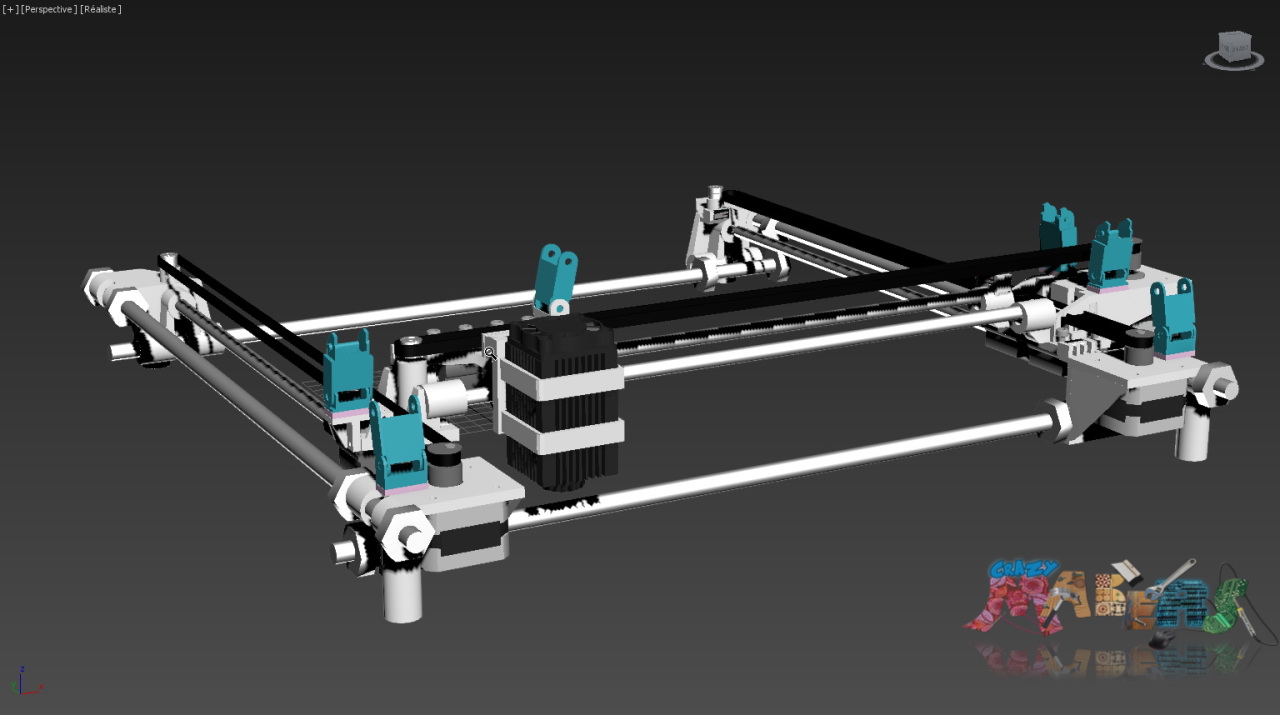
Voici une vue de l'ensemble monté avec les différents éléments. Les points d'accroche des guide câbles ont été modélisés également afin de réaliser les supports nécessaires...
Fabrication
J'ai commencé à imprimer les pièces avant la fin de la conception 3D de la machine car j'avais besoin de voir et toucher les pièces pour trouver diverses solutions... Je souhaitais aussi palper la résistance des pièces car il s'agissait de ma première impression 3D en ABS réputée difficile...
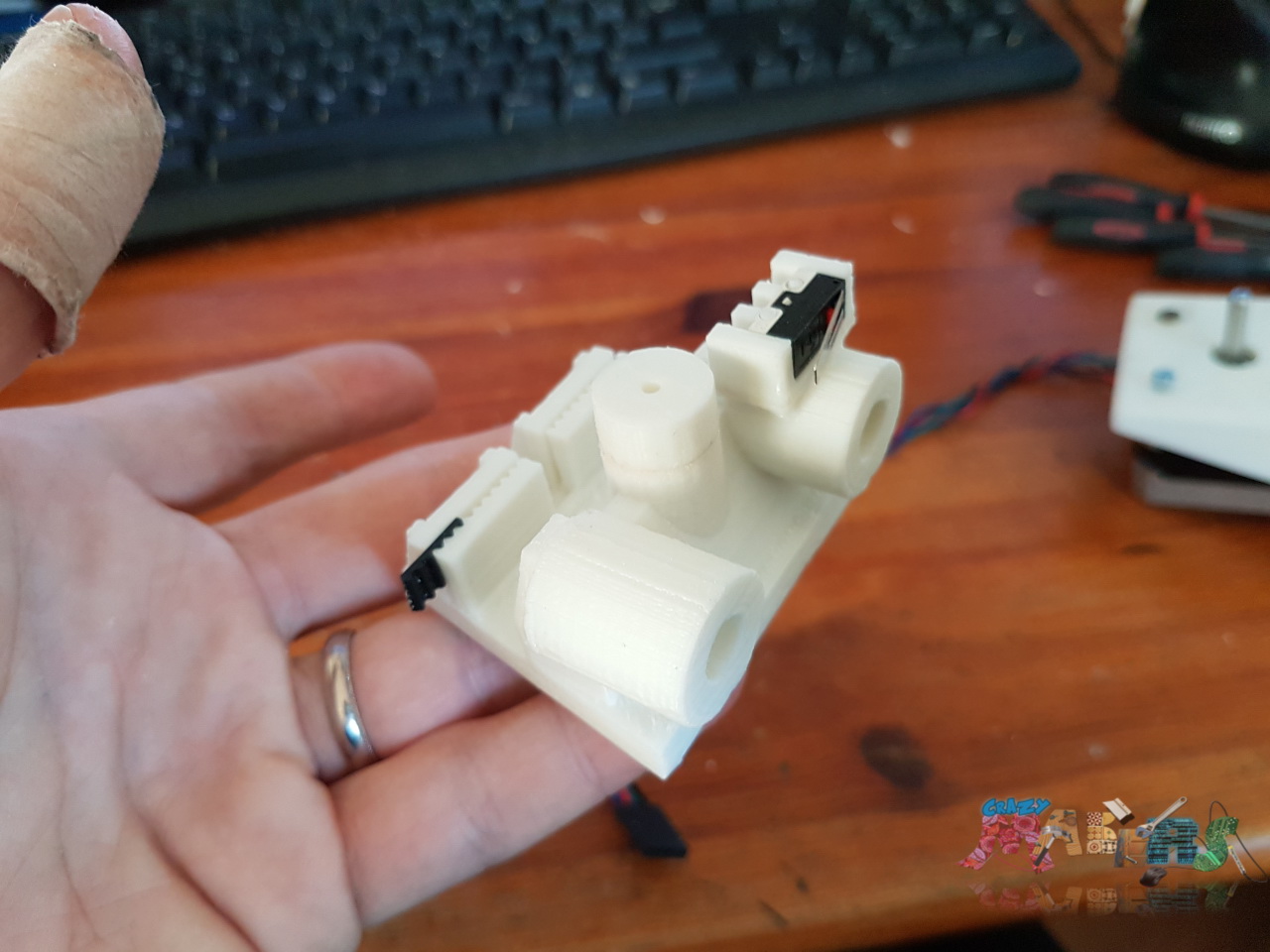
Le charriot Y gauche a été la première pièce qui a été imprimée, également la plus simple et la mieux réussie... une impression en couches de 0.2mm
J'y ai donc monté les pièces et me suis aperçu que j'avais oublié de prendre en compte le diamètre des têtes de vis CHC... un coup de dremel et ce fût réglé.
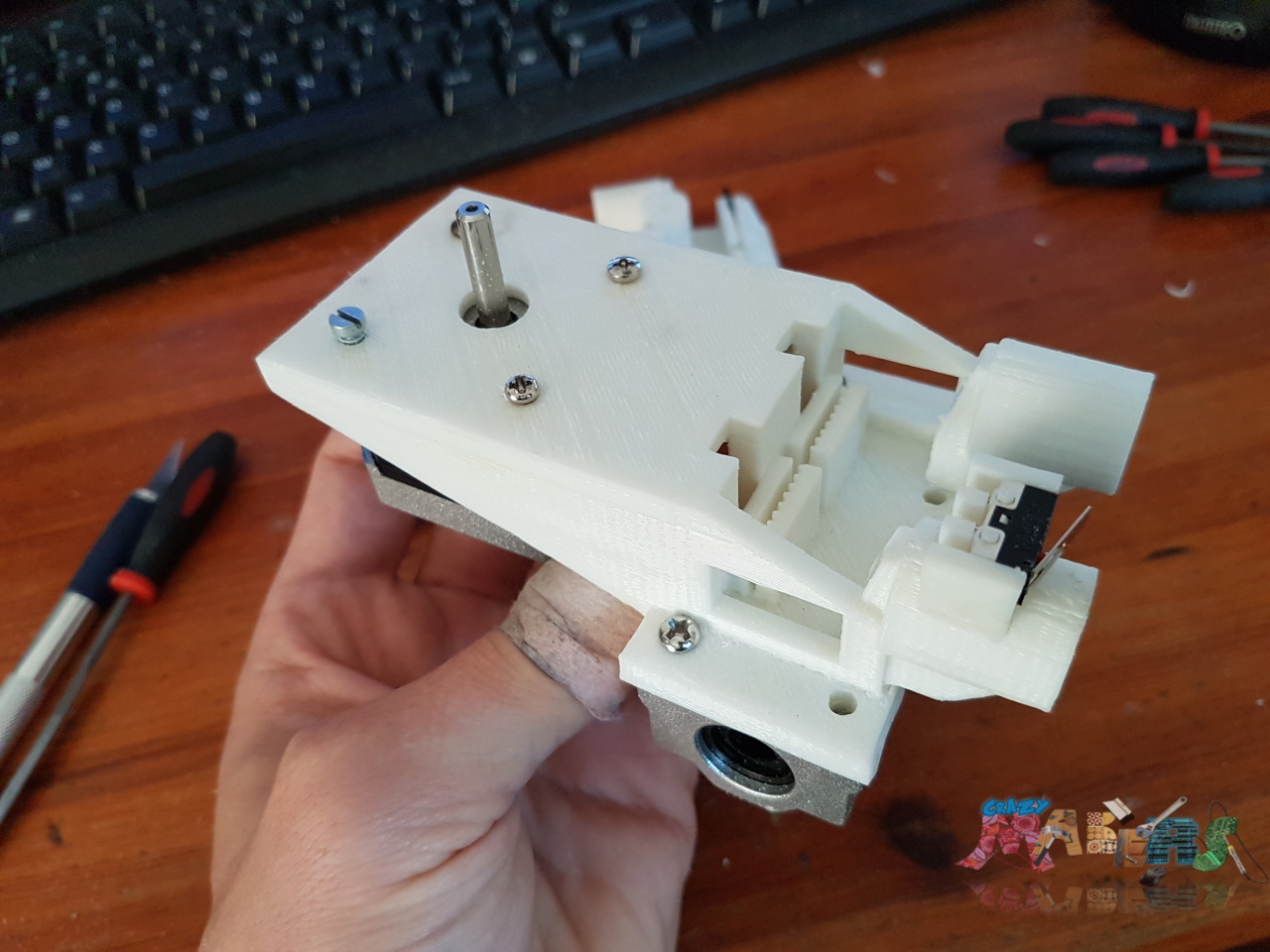
J'ai ensuite imprimé, monté et ajusté le charriot Y droit... Pas mal de parties surélevées ont posé problème. La suppression des suports d'impression a été difficile.
J'ai ensuite imprimé l'angle arrière droit et ai effectué un montage pour controller l'ajustement... un petit coup de forêt a été nécessaire pour le passage des tiges filetées...
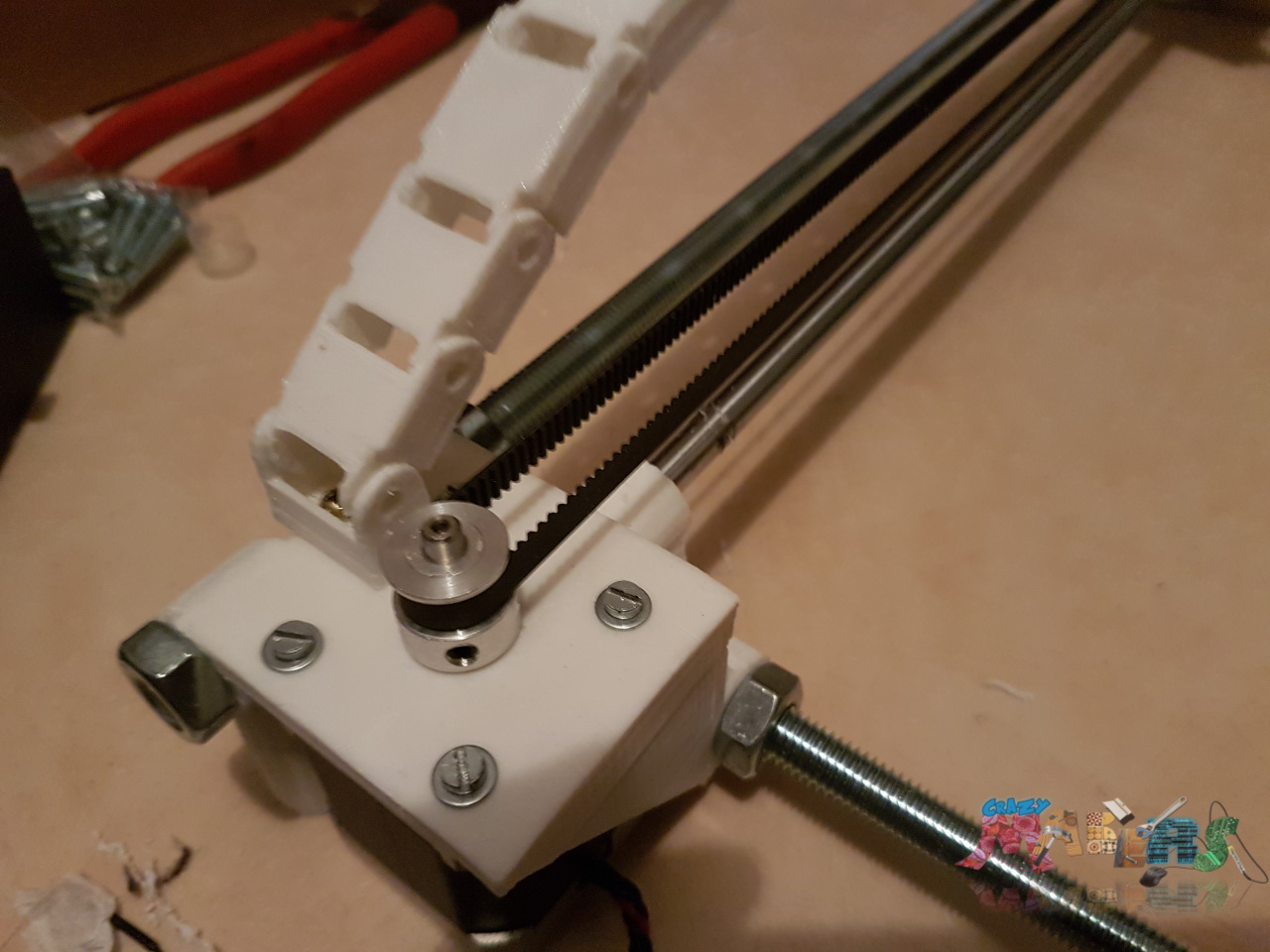
Le support avant Droit avec son moteur et son capteur...
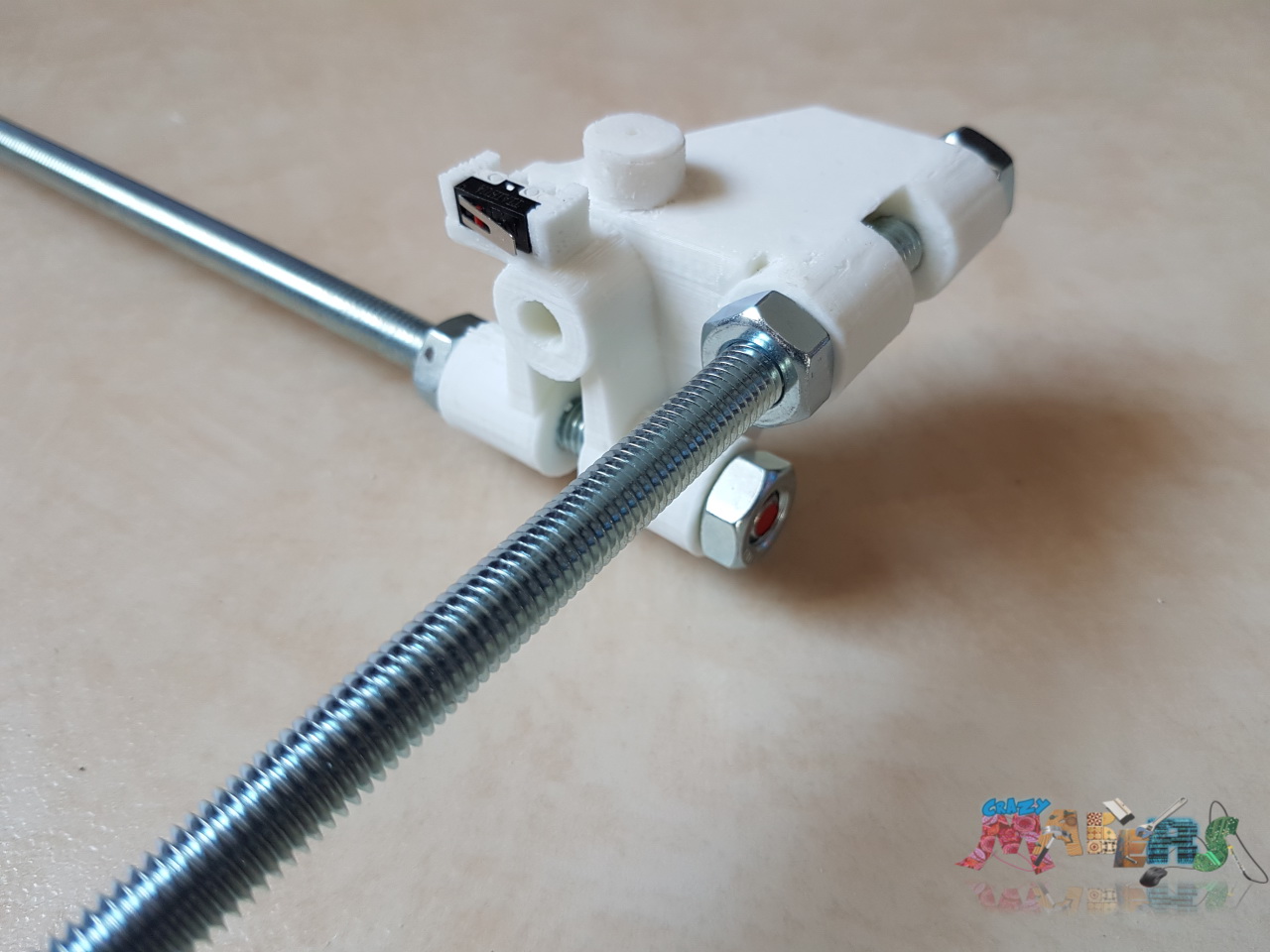
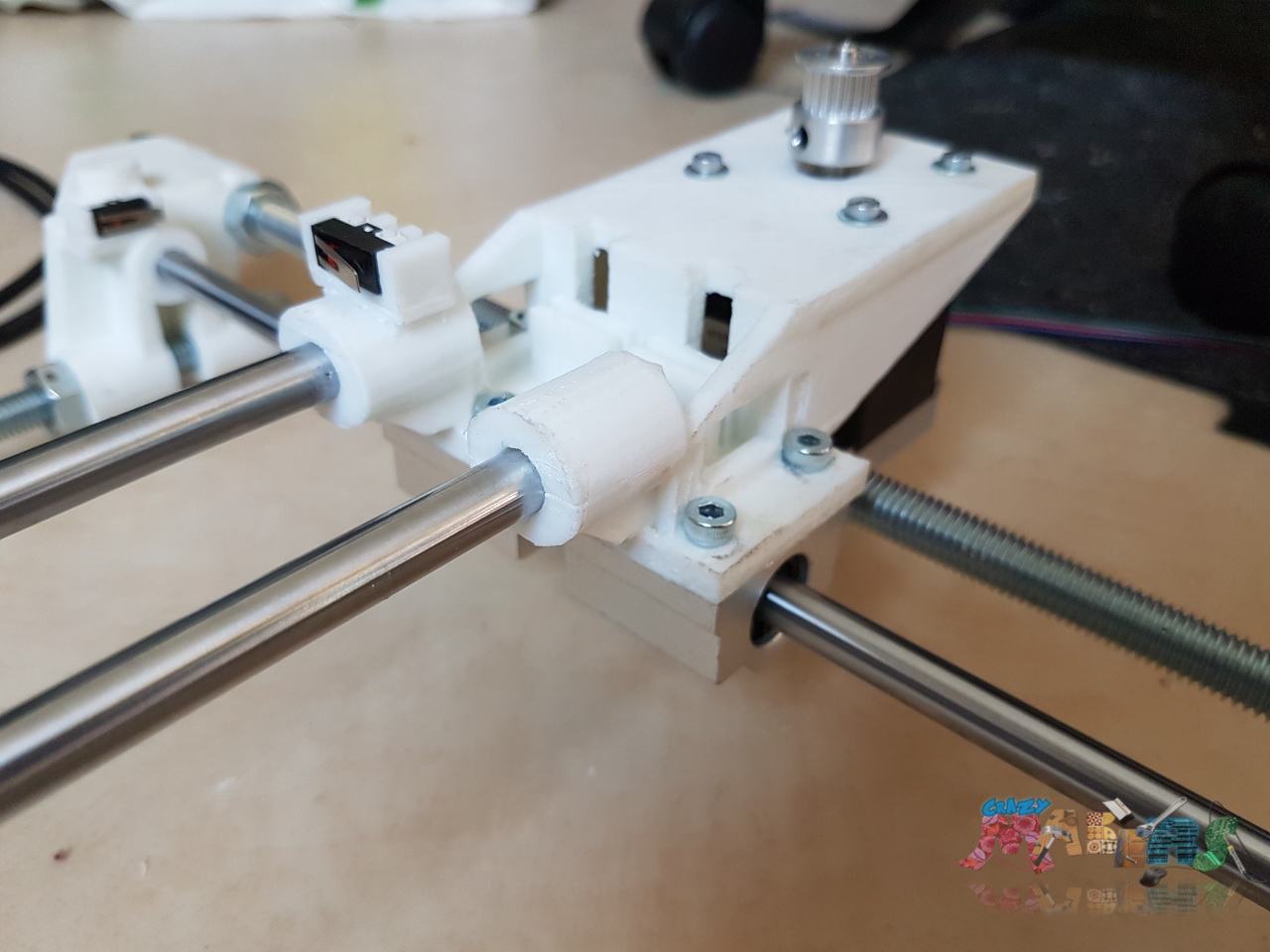
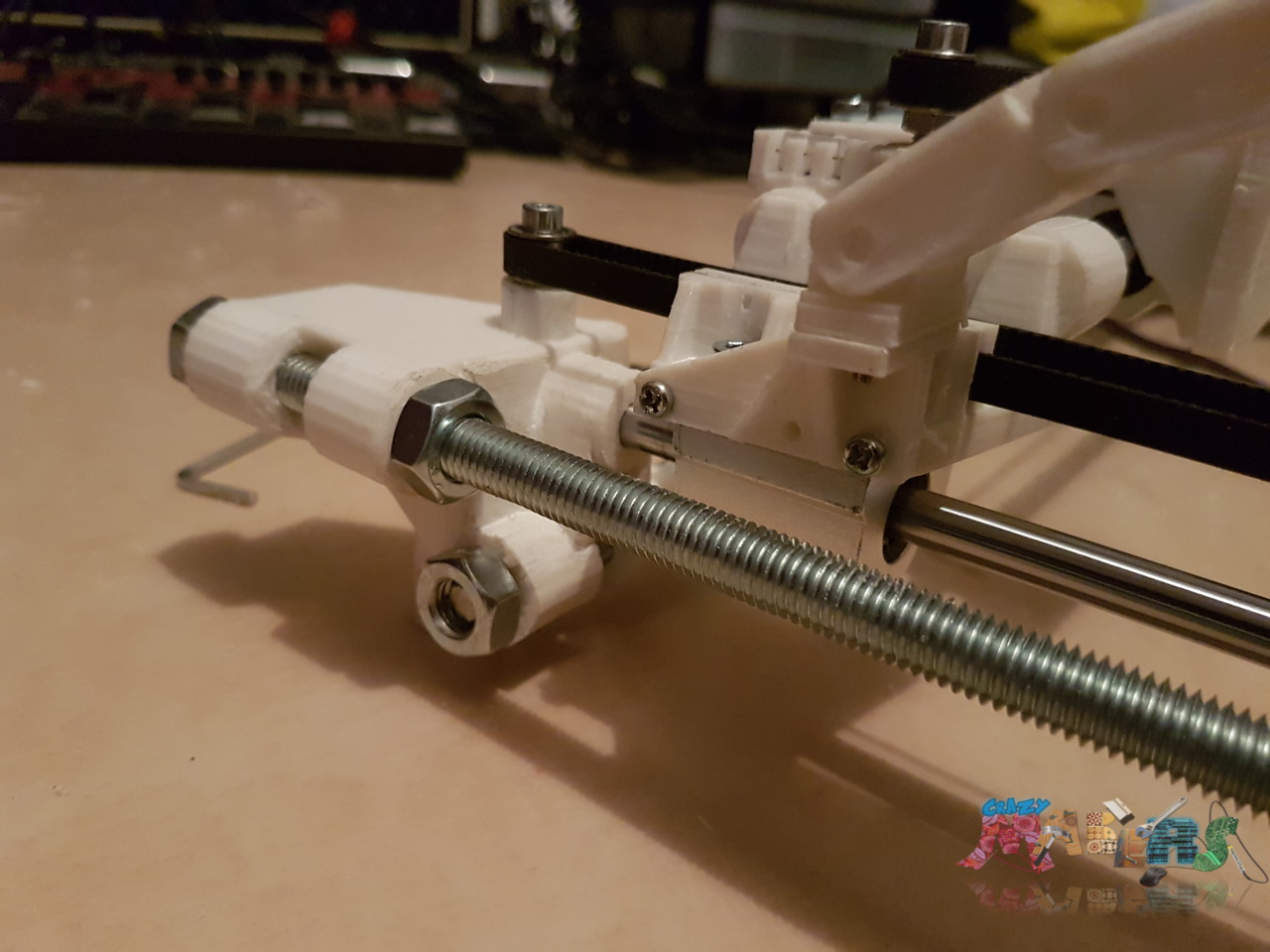
Le charriot Y droit installé avec les barres inox...
Le charriot X avec la première version du support de controlleur qui a été remplacé depuis.
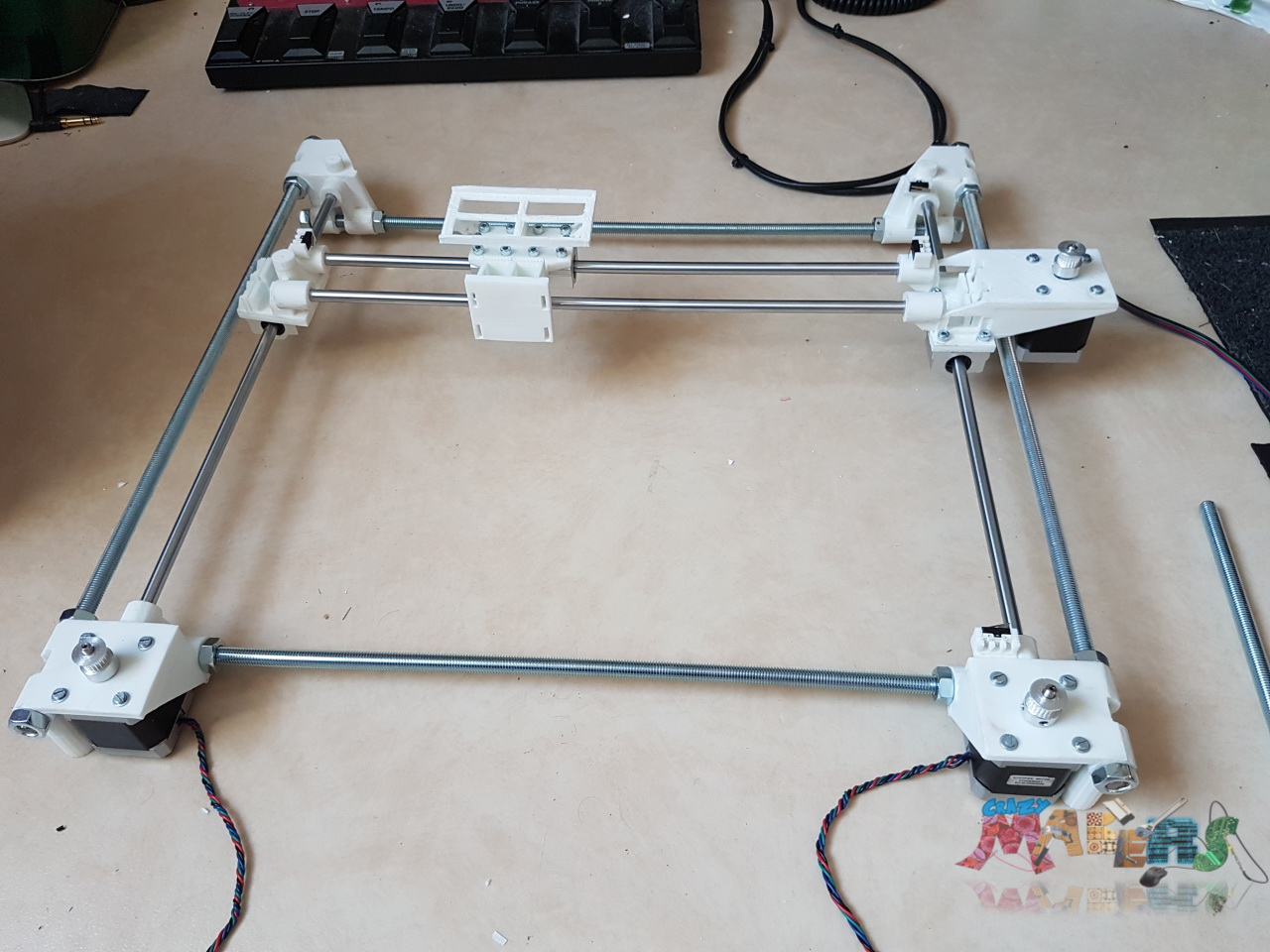
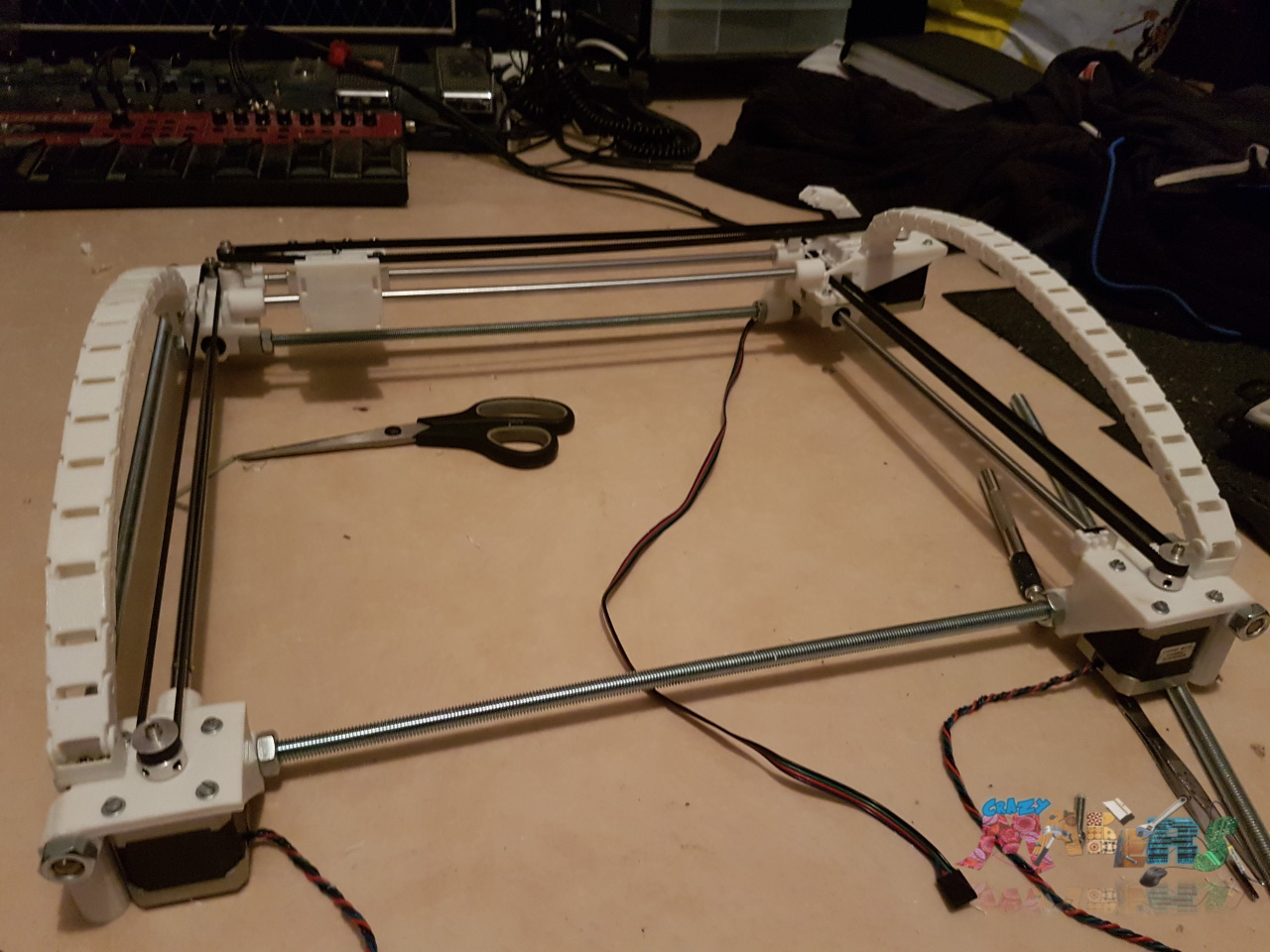
Une vue de l'ensemble de la machine...
Le projet est alors resté en standby pendant quelques temps car certaines pièces détachées tardaient à arriver d'asie...
Une fois les roulement les roulement de guidage des courroies reçus et les courroies également j'ai pû monter l'ensemble et faire quelques tests de mouvements avec l'arduino et le CNC Shield... Le test s'est avéré concluant!
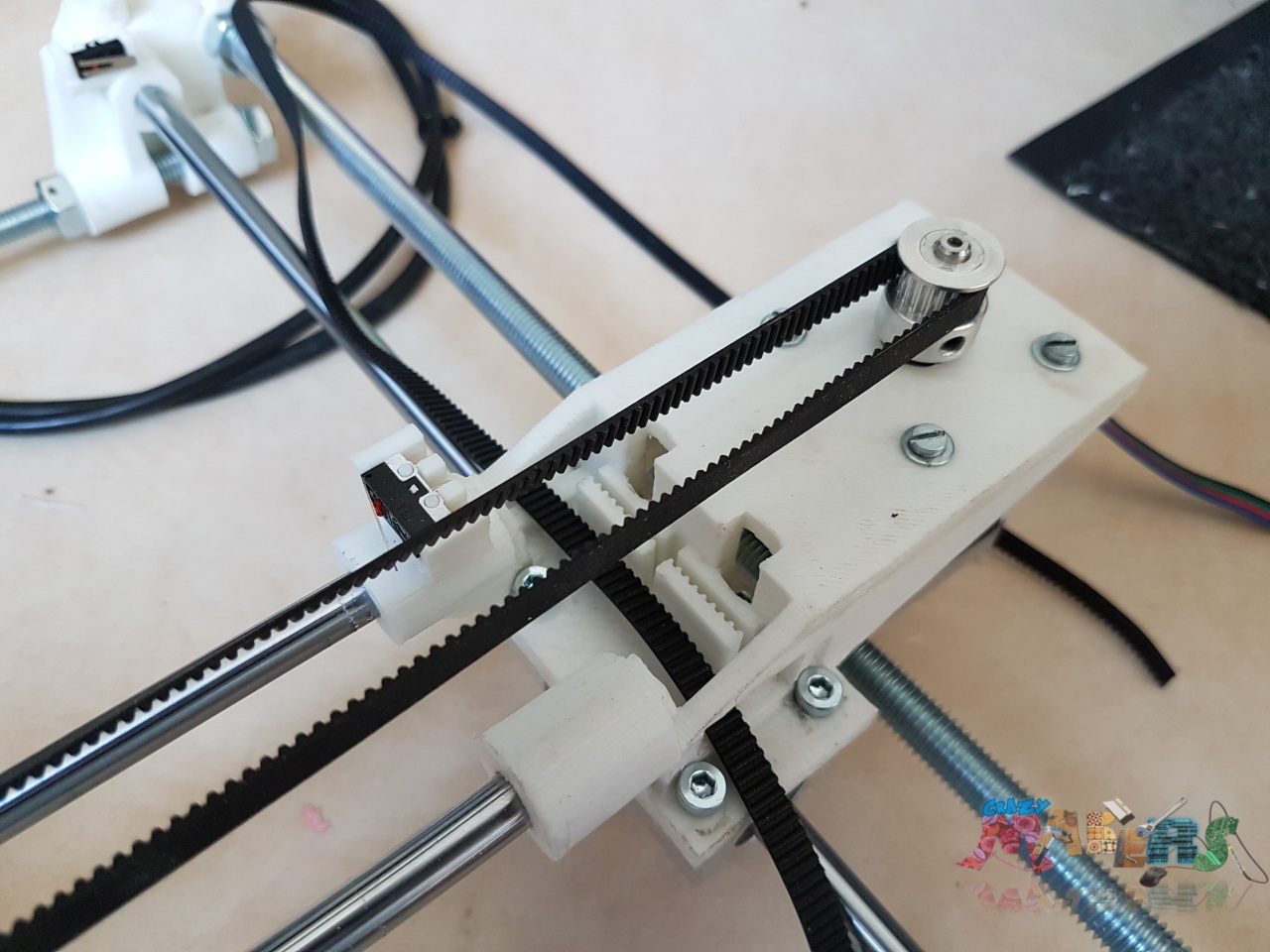
Quelques essais de mise en place ont été nécessaire pour définir une hauteur de poulie correcte...
Les extrémités des courroies se logent parfaitement dans les "griffes" prévues à cet effet.
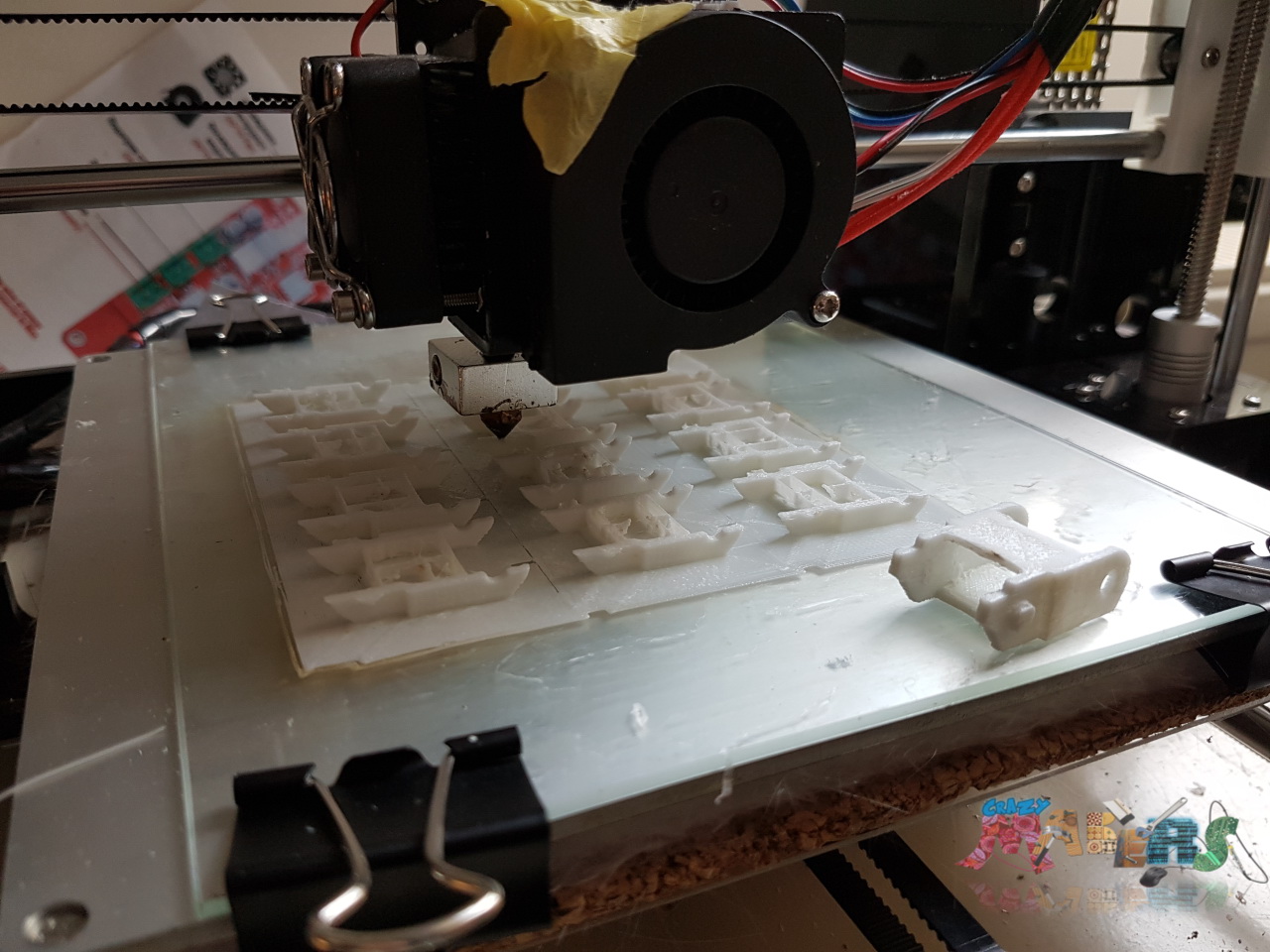
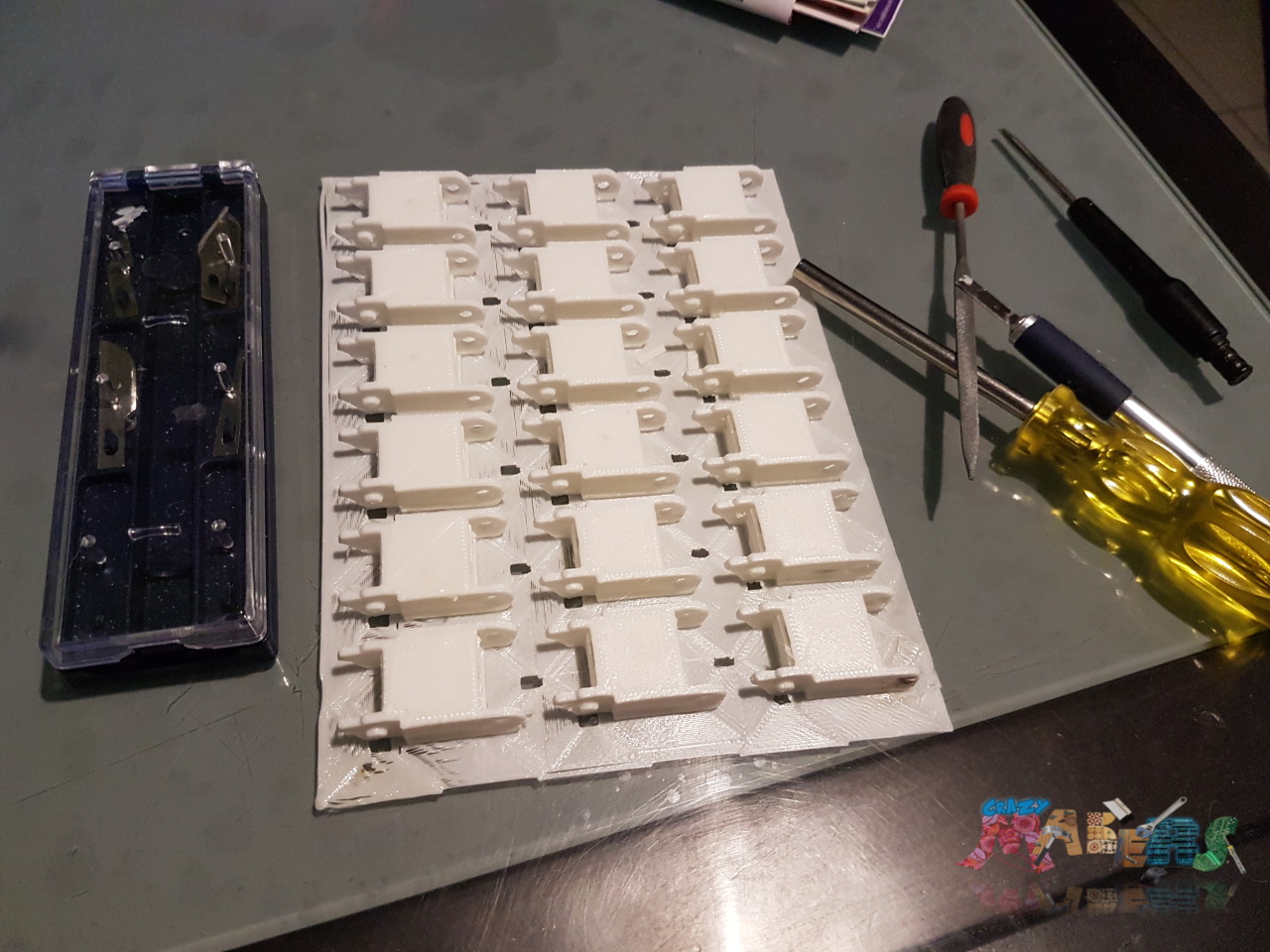
J'ai alors commencé l'impression des guides câbles (Cable Carrier) designés sur mesure.
3 lots de 18 maillons à limer et ajuster un par un...
Un des guide câbles terminé.
Il m'aura alors fallu concevoir et imprimer des support de fixation des guides sur mesure...
Le plus compliqué des supports de guide-câble.
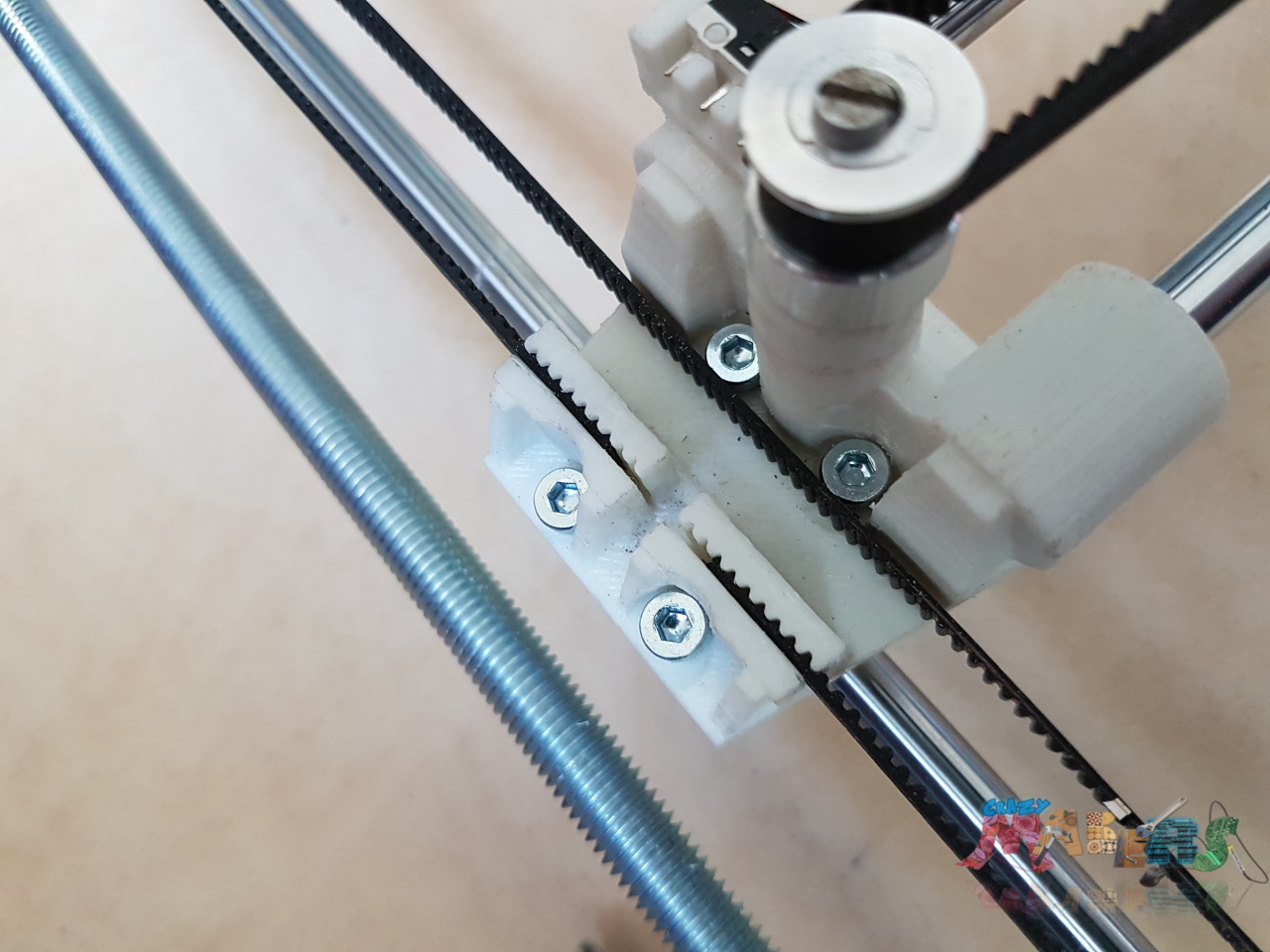
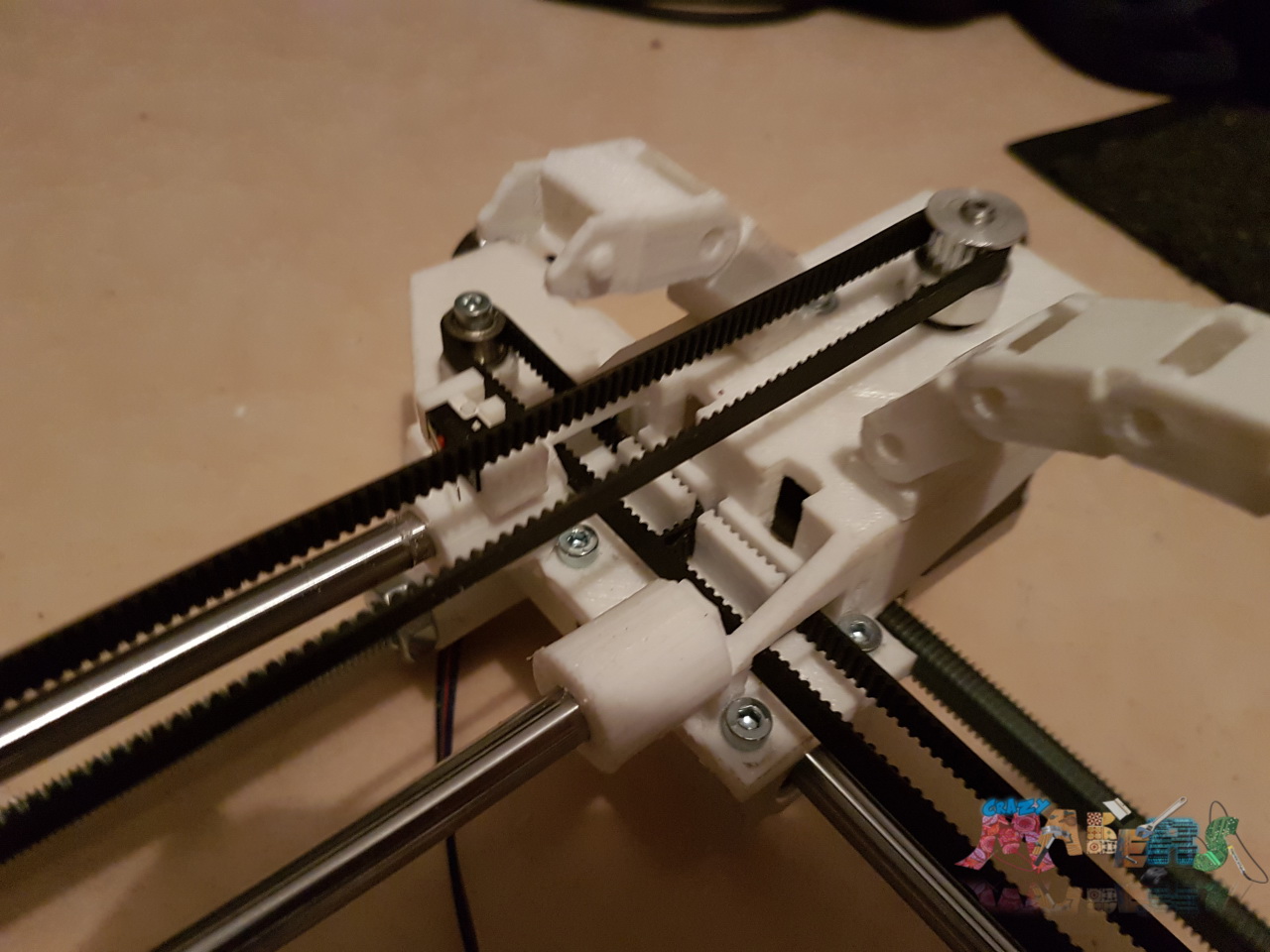
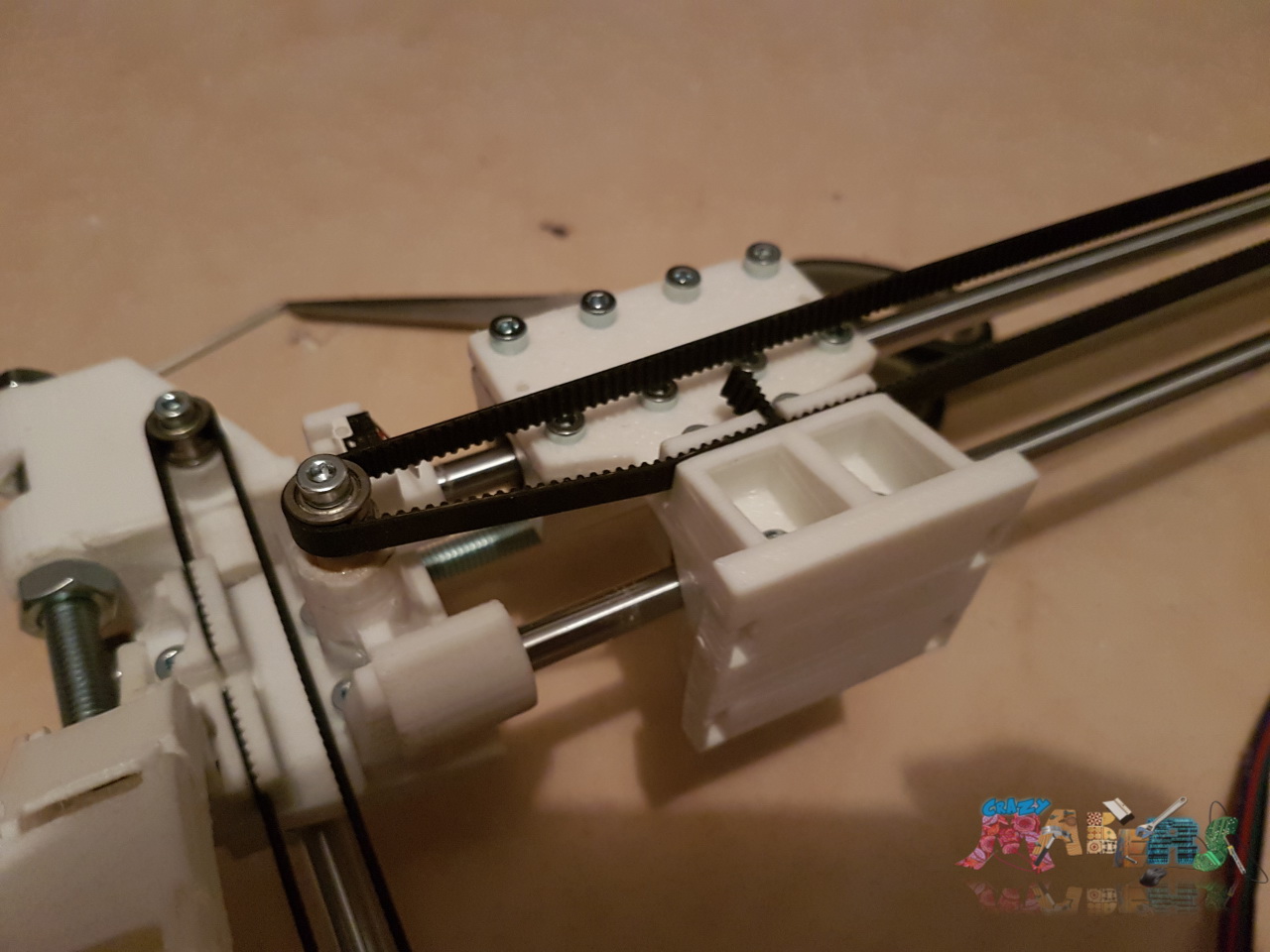
Entre-temps, j'ai reçu les roulements guide-courroie. j'ai donc pu finir le montage...
ici la courroie sur l'axe Y avec le charriot X.
Guide-câbles et courroies montés.
La partie électronique
Pas de grande nouveauté par rapport à mon ancienne machine si ce n'est l'utilisation d'un module plus puissant 2W avec un contrôleur TTL capable d'être piloté en PWM (Puissance variable pilotée par l'arduino)...
Voici le module laser commandé sur eBay.com Voir sur eBay il faut aller sur le .com car ces produits n'aparaissent pas sur le .fr
A réception de ce bijou de technologie... J'ai brûlé du carton... :D
Et il fait des dégâts...
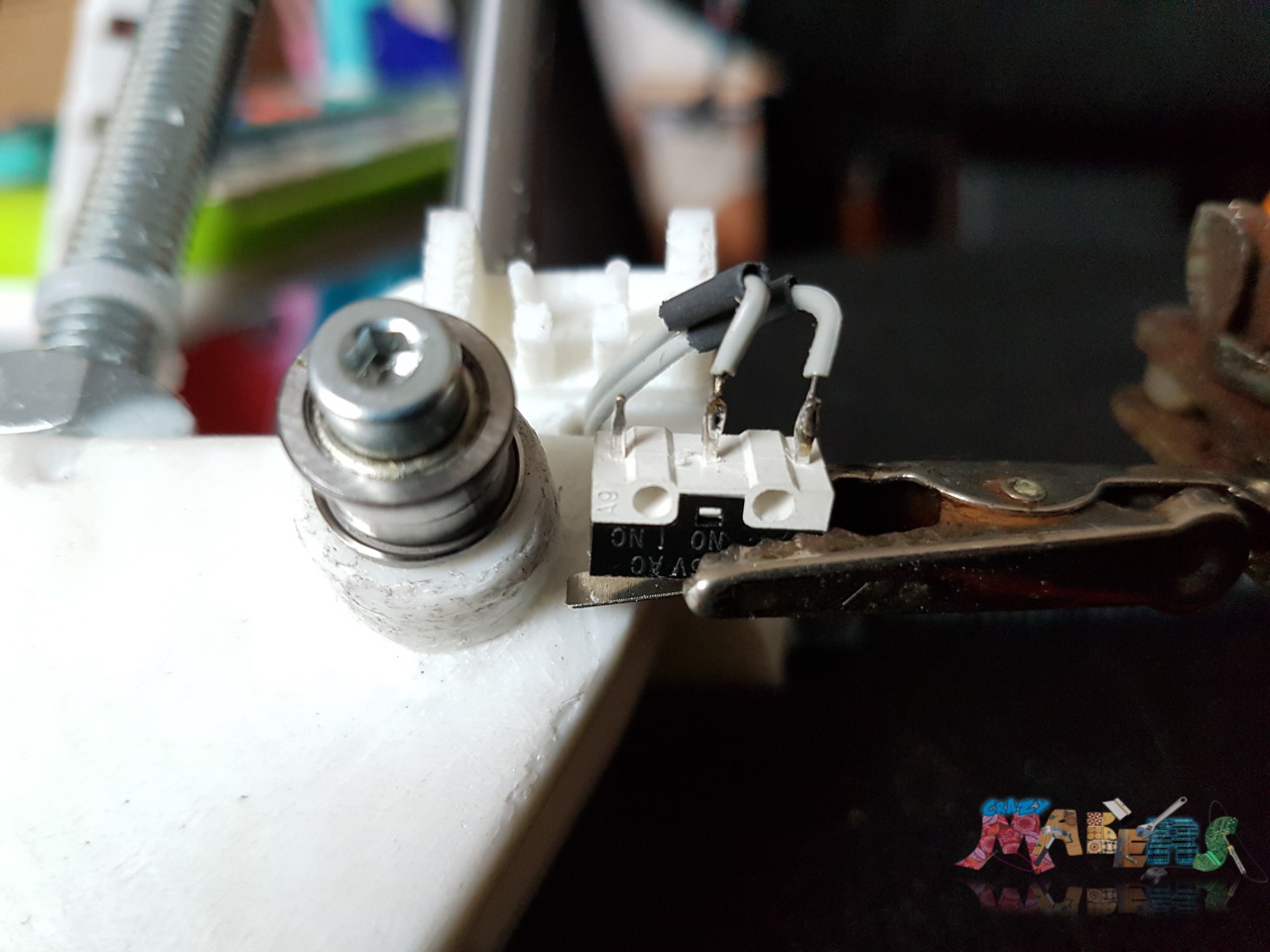
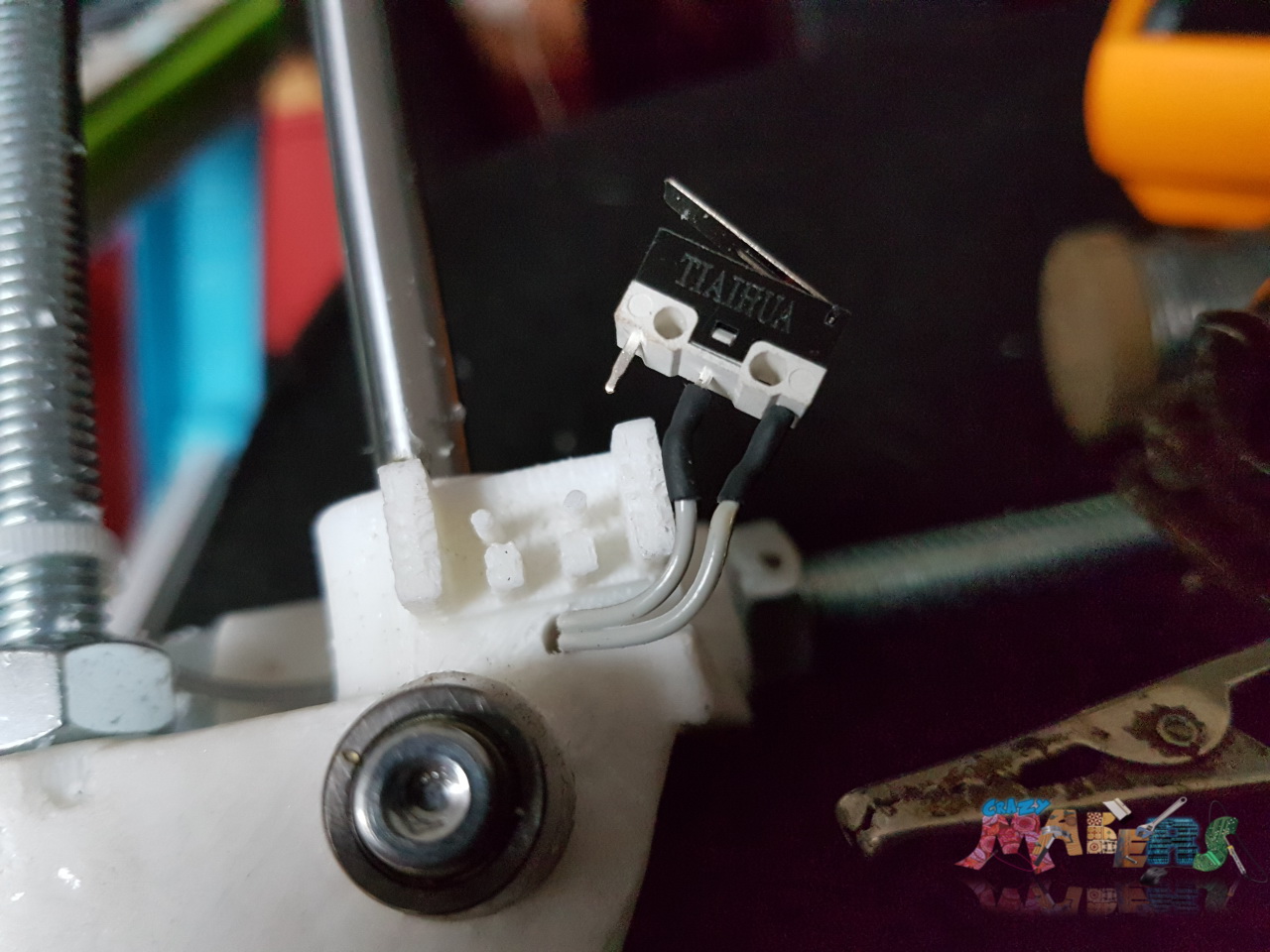
J'ai ensuite raccordé et monté les capteurs fin-de-course dans leurs emplacement...
Isolation des fils à la gaine thermo-rétractable.
De même pour l'axe X.
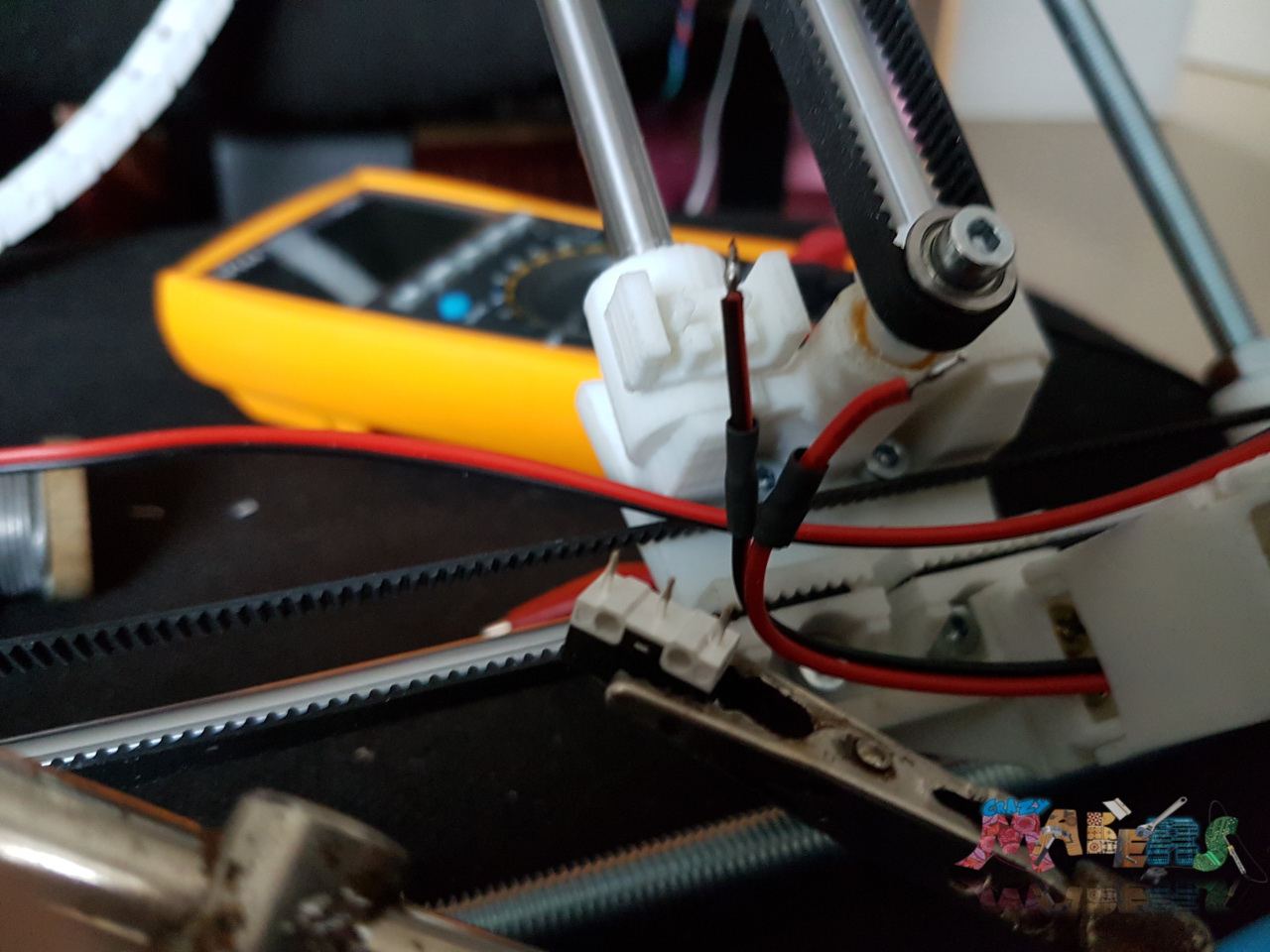
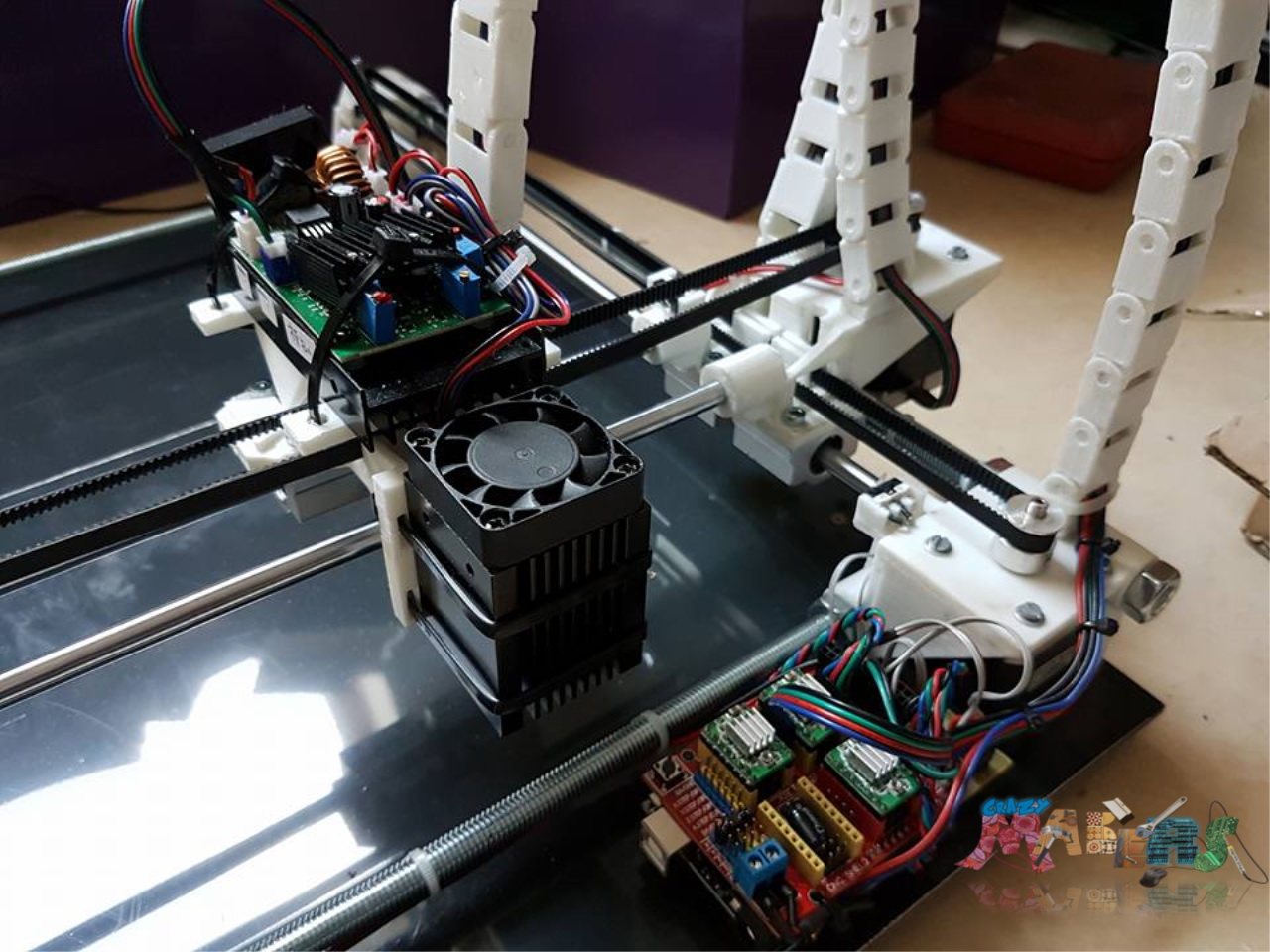
Il était alors temps de raccorder l'ensemble...
Le plus gros de l'électronique raccordé.
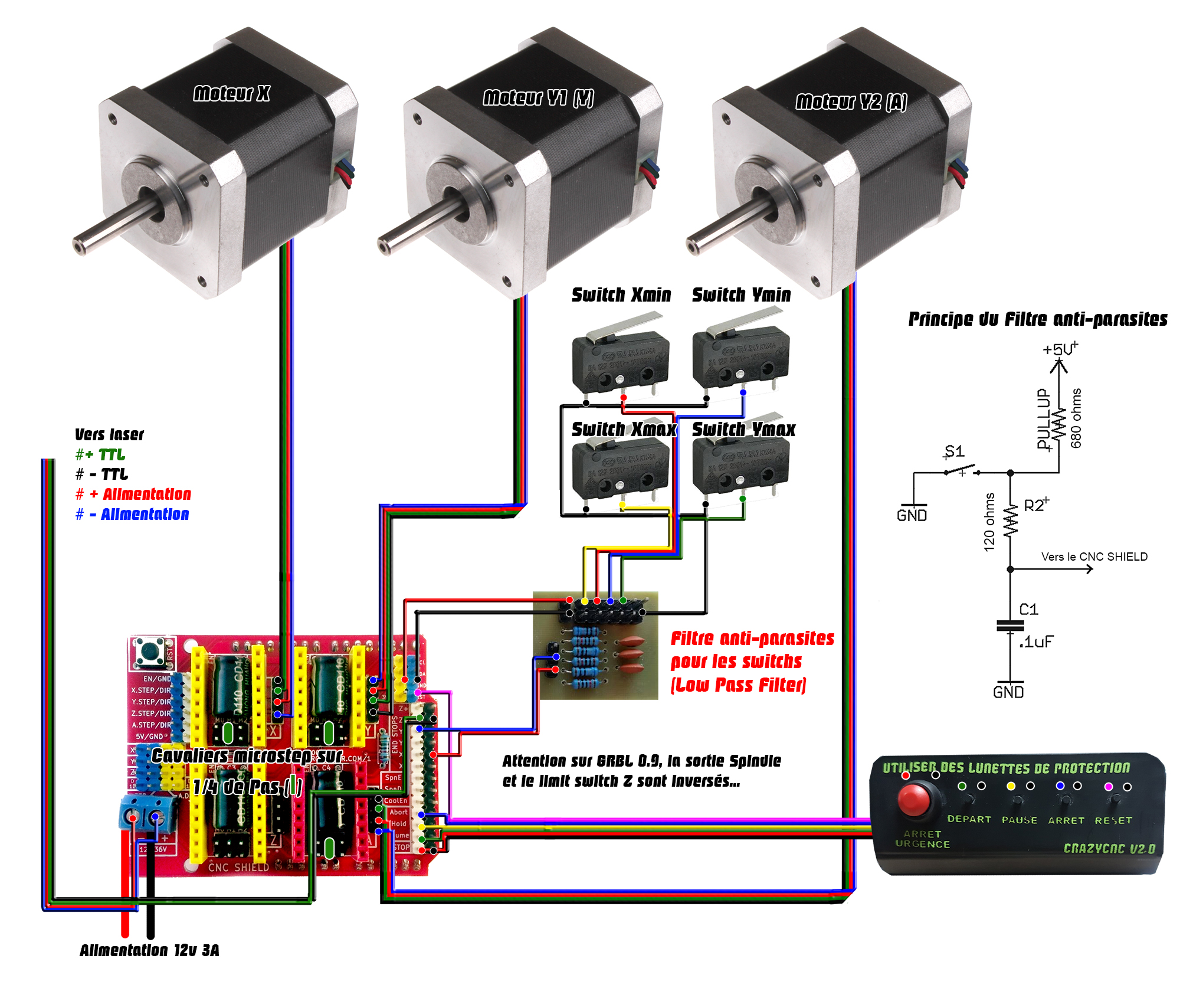
Schéma de principe de l'électronique de la machine
Voici un schéma théorique de l'électronique du système. On aperçoit qu'un filtre home-made a été ajouté... Si vous achetez des capteurs montés sur PCB avec filtre intégré (3fils) dans ce cas, le filtre est optionnel. Ce filtre a été ajouté car l'allumage d'un appareil électrique ou d'ampoule LED/Tube dans la maison déclenchait la sécurité fin-de-course de GRBL en cours de cycle.
Il faut également prendre en compte l'inversion des pins LIMIT Z et SPINDLE SPEED sur Grbl 0.9 (Inversion nécessaire pour l'accès au PWM - Variation de vitesse/puissance laser).
L'arduino, le CNC Shield et le filtre pour les fins de course.
Réalisation d'un support pour mon bouton d'arrêt d'urgence archi-bricolé.
Réalisation du pupitre dans une plaque de PVC noir (Récupéré d'un présentoir de parfumerie). Création et impression de pièces pour les boutons.
Le pupitre terminé.
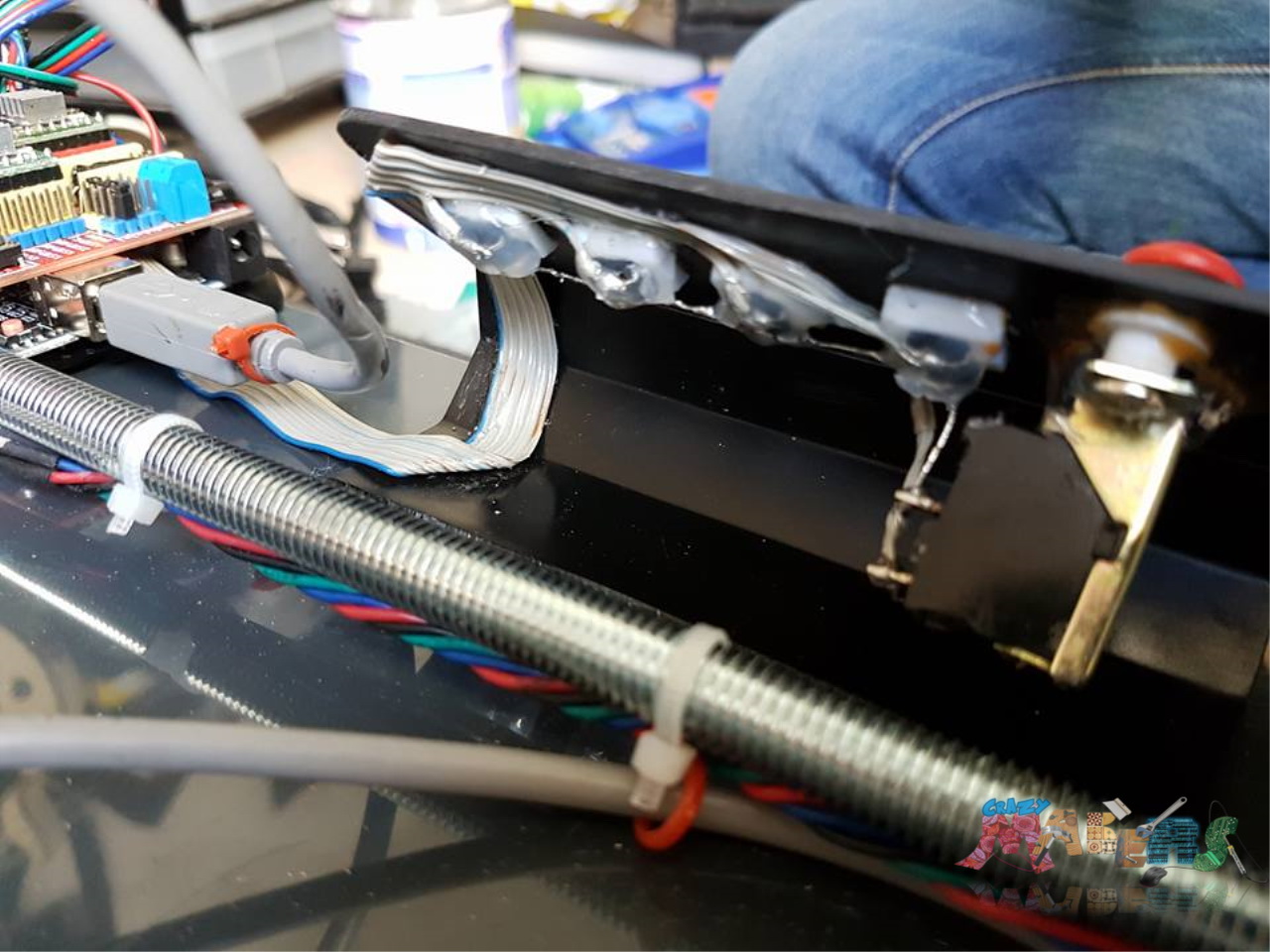
Raccordement du pupitre avec une nappe de récupération (Vieux téléviseur)
Découpe au laser et pose de la sérigraphie.
Conception et impression de pieds réglables qui puissent être collés sur CHC M4. Montage du plateau principal en deux pièces (Récupération oblige).
Conception de pieds fixes pour éviter la flexion de la table.
Tests
Voici deux petites vidéos sans prétention qui expliquent grossièrement comment fonctionne la machine. Dans la première partie, je prépare le fichier à envoyer à la machine (préparation du programme G-Code) et dans la seconde partie, j'exécute le programme.